Учебный центр «Дистанция»
|
Учебный центр АНО ДПО «Дистанция» предоставляет услуги в области организации дистанционного обучения, профессиональной подготовки и переподготовки специалистов, а также организации и проведения научно-практических конференций, мастер-классов и круглых столов. Наша специализация – это качественные образовательные услуги по двум ключевым отраслевым направлениям: медицина и строительство. АНО «Дистанция» проводит полный цикл работ по подготовке и логистическому обеспечению всех мероприятий. Мы предлагаем:
Для проведения образовательных мероприятий в формате круглых столов, семинаров и конференций АНО «Дистанция» обладает всей необходимой материально-технической базой, сетью проверенных партнёров и опытом по организации крупных научно-образовательных событий. Мы берём на себя вопросы, связанные с поиском и бронированием площадки, арендой и эксплуатацией необходимого оборудования, предоставлением полиграфии и расходных материалов, подготовкой презентаций, приглашением авторитетных докладчиков, обеспечением всей логистики, включая трансферы, проживание и организацию питания. Успех в современном бизнесе и профессиональной деятельности базируется на использовании современных технологий и наличии квалифицированных кадров. Сегодня в цене профессионалы, обладающие универсальными знаниями и компетенциями. Задача подготовки высококвалифицированных специалистов приобретает всё большую значимость по мере развития технологий. Сегодня высококлассный специалист – это не тот, кто просто получил высшее образование. За время работы учебного центра в нем прошло обучение более 10 000 слушателей, мы провели несколько десятков массовых образовательных и научных мероприятий, в том числе различных форумов и семинаров. Среди клиентов нашего учебного центра такие компании, как ООО «АБС Электротехника», ОАО «ВНИИР», Группа компаний «ВЫМПЕЛ», ОАО «Газпром промгаз», ООО «Газпром проектирование», АО «Институт Гидропроект», ОАО «Ленгидропроект, ООО «Прософт-Системы», АО «Транснефть-метрология». Мы также сотрудничали с такими известными медицинскими организациями и учреждениями как Национальный медико-хирургический Центр им. Н.И. Пирогова, Альянс клинических химиотерапевтов и микробиологов, Региональная общественная организация медицинских сестер Москвы, Московское Научное Общество Анестезиологов- Реаниматологов, Ассоциация флебологов России, Российское общество хирургов. АНО «Дистанция» проводит непрерывную актуализацию учебных программ, отслеживая изменения в профильном законодательстве.
Обучение по дистанционным методикам в АНО ДПО «Дистанция» — это:
По завершении обучения в АНО ДПО «Дистанция» выдаются квалификационные удостоверения установленного образца.
|


 Все программы составляются и в случае необходимости дополняются преподавателями и методистами с большим стажем работы в ведущих ВУЗах РФ. Таким образом, учебный центр гарантирует максимально полную и качественную подготовку персонала по любому из обозначенных направлений.
Все программы составляются и в случае необходимости дополняются преподавателями и методистами с большим стажем работы в ведущих ВУЗах РФ. Таким образом, учебный центр гарантирует максимально полную и качественную подготовку персонала по любому из обозначенных направлений.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
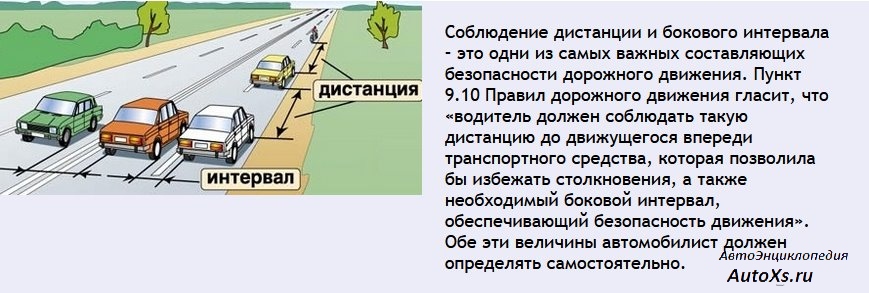
 У каждого 5-го россиянина есть родственники или знакомые, которые получили травмы в результате дорожно-транспортных происшествий, у 8% — близкие люди, которые погибли в результате аварии на дороге. При этом одним из главных факторов аварийности, который влияет на столь высокие показатели, является не сам автомобиль, а человек, который им управляет, поскольку именно по вине водителей происходит большая часть дорожно-транспортных происшествий.
У каждого 5-го россиянина есть родственники или знакомые, которые получили травмы в результате дорожно-транспортных происшествий, у 8% — близкие люди, которые погибли в результате аварии на дороге. При этом одним из главных факторов аварийности, который влияет на столь высокие показатели, является не сам автомобиль, а человек, который им управляет, поскольку именно по вине водителей происходит большая часть дорожно-транспортных происшествий.
 Кампания «Дистанция» пройдет с марта по май этого года. В рамках проекта в десяти российских регионах будут реализованы обучающие тренинги, уроки и эксперименты. Организаторы проекта – Госавтоинспекция МВД России и Российский союз автостраховщиков при информационной поддержке экспертного центра «Движение без опасности».
Кампания «Дистанция» пройдет с марта по май этого года. В рамках проекта в десяти российских регионах будут реализованы обучающие тренинги, уроки и эксперименты. Организаторы проекта – Госавтоинспекция МВД России и Российский союз автостраховщиков при информационной поддержке экспертного центра «Движение без опасности».

 gif» align=»left» valign=»top»>
gif» align=»left» valign=»top»> gif» align=»right» valign=»top»>
gif» align=»right» valign=»top»> Что такое расстояние видимости (дорожная техника)
от vicky
Расстояние вдоль центральной линии дороги, на котором водитель может видеть объект, неподвижный или движущийся на определенной высоте над проезжей частью, называется расстоянием видимости.
Расстояние видимости — это длина дороги, видимая впереди водителю в любой момент. Стандарты дальности видимости должны удовлетворять следующим условиям:
- Водитель, движущийся с расчетной скоростью, имеет достаточную дальность видимости или видимую длину дороги, чтобы остановить транспортное средство в случае любого препятствия на дороге впереди без столкновения.
- Водитель, движущийся впереди, должен иметь возможность обгонять медленно движущиеся транспортные средства через разумные промежутки времени, не создавая препятствия или опасности для движения в противоположном направлении.

- Водитель, выезжающий на нерегулируемый перекресток, должен иметь достаточную видимость, чтобы он мог управлять своим транспортным средством, чтобы избежать столкновения с другим транспортным средством.
Расстояние видимости зависит от следующих факторов
- Скорость автомобиля.
- Сопротивление трения дорожного покрытия.
- Высота глаз водителя.
- Уклон дорожного покрытия.
- Время восприятия и время реакции тормоза.
При геометрическом проектировании дороги учитываются следующие типы дальности видимости:
- Расстояние видимости при остановке или непроезде
- Обгон или прохождение дистанции видимости
- Промежуточное расстояние видимости
- Расстояние боковой видимости.
Расстояние в чистоте впереди, необходимое водителю для остановки своего автомобиля перед встречей с неподвижным объектом на дороге, называется расстоянием видимости при остановке или непроезде.
Ниже приведены некоторые примеры дальности видимости в различных дорожных ситуациях.
1. Расстояние видимости по горизонтальной кривой
2. Расстояние видимости на пересечении дорог
3. Расстояние видимости на кривой вертикальной вершины
водитель, зрение которого находится на высоте 1,22 м над поверхностью дороги, может видеть верхнюю часть объекта высотой 15 см на дороге.
В таблице ниже показаны различные расстояния безопасной остановки для различных расчетных скоростей:
| Скорость | Восприятие и реакция на торможение | Торможение | Безопасная дистанция видимости при остановке | |||
|---|---|---|---|---|---|---|
| V, км/ч | Время t, сек f | Расчетные значения (d1 + d2) | Расчетные значения (м) | |||
| 20 | 2,5 | 14 | 0,40 | 4 | 18 | 20 |
| 25 | 2,5 | 18 | 0,40 | 6 | 24 | 25 |
| 30 | 2,5 | 21 | 0,40 | 9 | 30 | 30 |
| 40 | 2,5 | 28 | 0,38 | 17 | 45 | 45 |
| 50 | 2,5 | 35 | 0,37 | 27 | 62 | 60 |
| 60 | 2,5 | 42 | 0,36 | 39 | 81 | 80 |
| 65 | 2,5 | 45 | 0,36 | 46 | 91 | 90 |
| 80 | 2,5 | 56 | 0,35 | 72 | 128 | 130 |
| 100 | 2,5 | 70 | 0,35 | 112 | 182 | 180 |
2.
 Расстояние видимости для обгона (OSD):
Расстояние видимости для обгона (OSD): противоположное направление называется обгоном или прохождением дистанции видимости.
Минимальное превышение дистанции видимости зависит от следующих факторов:
- Скорость обгона, обгоняемого и скорость встречного транспортного средства.
- Расстояние между автомобилями.
- Ускорение обгоняющего автомобиля.
- Мастерство и время реакции водителя.
- Рассмотрим двухполосную прямую дорогу с тремя транспортными средствами A, B и C, как показано на рис. .
- Пусть скорость быстро движущегося автомобиля А равна V1 м/сек, а скорость медленно движущегося автомобиля В равна V2 м/сек. Пусть третье транспортное средство С движется с противоположной стороны со скоростью V3 м/с.
- Предположим, что V = расчетная скорость в м/сек.
∴ V = V1 ⊂ V3
- Чтобы обогнать транспортное средство B, водитель транспортного средства
«A» должен применять следующие критерии:
- Он должен снизить скорость до V2 и выйти на вторую полосу. Когда он начинает выходить, автомобиль «А» должен находиться на безопасном расстоянии «S» позади автомобиля «В».
- Водитель в «А» должен ускорить свое транспортное средство на второй полосе «А» до тех пор, пока транспортное средство «В» не будет обогнано. Затем он должен вернуть свое транспортное средство на исходную первую полосу перед транспортным средством «В», и в этот момент транспортное средство «А» должно снова оказаться на безопасном расстоянии и впереди транспортного средства «В».
- В этом процессе обгона он должен избежать столкновения с транспортным средством «С», потому что тогда он движется с ускорением по второй полосе, по которой транспортное средство «С» приближается с противоположного направления.
 Когда он начинает выходить, автомобиль «А» должен находиться на безопасном расстоянии «S» позади автомобиля «В».
Когда он начинает выходить, автомобиль «А» должен находиться на безопасном расстоянии «S» позади автомобиля «В». Тогда L = длина OSD
L = d1 + d2 + d3
Где,
d1 = расстояние, пройденное обгоняющим транспортным средством «А» по первой полосе до выезда на вторую полосу для этой цели обгона во время этого он замедляется.
Его скорость V2, если учесть, что пространство «S» является безопасным расстоянием между A и B,
∴ d1 = (V2 × t)
d2 = Расстояние, пройденное транспортным средством «A» за время обгона при приближении с первой полосы на вторую, разгоняясь по второй полосе и возвращаясь к,
Первая полоса = (2S × V2 × t0)
Где,
t0 = время, затрачиваемое на обгон с ускорением «a» м/с² чтобы преодолеть расстояние (d2 – 2S).
d3 = Расстояние, пройденное транспортным средством «C» на второй полосе за время ускорения, t0 = (V x t0).
- Замена d1, d2 и d3 в уравнении, L = (V2 x t) + (2S + V2 x t0) + (V x t0) = [V2t +(Vst0+2S) + V t0]
- Безопасное расстояние «S», которое должно соблюдаться между транспортным средством «А» (быстро движущееся) и транспортным средством В (медленно движущимся), задается выражением. S = (V2 × 0,7) + длина транспортного средства «A» (предположим, 6 м) = 0,7 V2 + 6,
- Значение t0 получается из следующего уравнения: t0 = 2√S/a, здесь a = ускорение в м/с².
В таблице ниже показано расстояние видимости для обгона для различных скоростей в соответствии с рекомендациями IRC 9.0005
| Старший номер | Скорость в км/ч | Компонент времени в секундах | |||
| Для обгона Manocurve | Для встречного автомобиля | Итого | Безопасное экранное меню в метрах | ||
| 1 | 40 | 9 | 6 | 15 | 165 |
| 2 | 50 | 10 | 7 | 17 | 235 |
| 3 | 60 | 10,8 | 7,2 | 18 | 300 |
| 4 | 65 | 11,5 | 7,5 | 19 | 340 |
| 5 | 80 | 12,5 | 8,5 | 21 | 470 |
| 6 | 100 | 14 | 9 | 23 | 640 |
 Промежуточное расстояние видимости (ISD):
Промежуточное расстояние видимости (ISD): Расстояние, которое дает водителю разумные возможности для осторожного обгона впереди идущего транспортного средства, называется средней дистанцией видимости. ISD принимается за удвоенный безопасный тормозной путь.
Расчетные значения ISD, рекомендованные IRC, приведены ниже
| Скорость (км/ч) | Промежуточная дальность видимости | Скорость (км/ч) | ISD | |
|---|---|---|---|---|
| 20 | 40 | 50 | 120 | |
| 25 | 50 | 60 | 160 | |
| 30 | 60 | 65 | 180 | |
| 35 | 80 | 80 | 240 | |
| 40 | 90 | 100 | 360 | |
Расстояние видимости, необходимое водителю транспортного средства, который видит другие транспортные средства, приближающиеся к перекрестку, реагирует и применяет тормоза, чтобы полностью остановить свой автомобиль на перекрестке без столкновения или аварией называется безопасная дистанция видимости для въезда на перекресток или дистанция боковой видимости.
Расстояние боковой видимости должно быть достаточным для выполнения следующих трех условий:
- Чтобы позволить обоим или хотя бы одному приближающемуся транспортному средству изменить скорость во избежание столкновения.
- Остановить хотя бы один или оба приближающихся автомобиля до достижения точки
столкновения. - Чтобы дать возможность остановившимся транспортным средствам на второстепенной дороге начать движение, разогнаться и пересечь главную дорогу до того, как приближающееся транспортное средство, движущееся с проектной скоростью по главной дороге, достигнет перекрестка.
Читайте также: Выравнивание дорог (строительство дорог)
Читайте также: Супервысота и как ее рассчитать
Читайте также: Резервуар | Типы и зоны хранения резервуара
Like this:
Like Загрузка…
Расстояние видимости в дорожном строительстве — типы и расчеты
🕑 Время чтения: 1 минута
Видимость дороги впереди водителя поможет в безопасной и эффективной эксплуатации транспортных средств. Это, следовательно, потребует, чтобы геометрическая конструкция была высокоэффективной, чтобы длина дороги была хорошо видна водителю даже на расстоянии впереди. Это расстояние, следовательно, называется расстоянием видимости.
Это, следовательно, потребует, чтобы геометрическая конструкция была высокоэффективной, чтобы длина дороги была хорошо видна водителю даже на расстоянии впереди. Это расстояние, следовательно, называется расстоянием видимости.
Содержание:
- Расстояние прицела и их типы
- ДАВАРИТЕЛЬНОСТЬ ДАМЕЧИ
- ОБЛАСОВАНИЕ ДАМЕР ЗАЯВЛЕНИЯ (OSD)
- Вычисление расстояния прицела
- Скорость тормоза
- Автомобиль
- Время реакции водителя
- Уклон дороги
Дальностью видимости в точке называют фактическое расстояние, наблюдаемое вдоль поверхности дороги, которое видно водителю с заданной высоты над проезжей частью. Это расстояние позволит водителю видеть все неподвижные и движущиеся объекты перед автомобилем.
В основном при геометрическом проектировании дорожного строительства учитываются в основном три расстояния видимости. Они есть:
Они есть:
- SSD — дистанция видимости при остановке или абсолютная минимальная дистанция видимости
- ISD — промежуточное расстояние видимости: вдвое превышает значение SSD .
- OSD — расстояние видимости для обгона
Помимо этого у нас есть:
- Расстояние видимости фар
- Безопасное расстояние видимости
Расстояние, доступное водителю при ночном движении, называется дальностью видимости фар. Ночью вождение облегчается подсветкой фар.
Расстояние видимости, доступное для въезда на перекресток, называется безопасным расстоянием видимости.
Каким бы ни был тормозной путь, необходимо, чтобы водитель, движущийся с расчетной скоростью, обладал достаточным расстоянием проезжей части. Это расстояние будет в пределах прямой видимости, чтобы предотвратить столкновение транспортного средства с движущимся или неподвижным объектом на полосе движения.
Это расстояние видимости, доступное для движения транспортного средства по шоссе, которое позволяет водителю безопасно остановить транспортное средство без столкновения с каким-либо другим препятствием.
Как упоминалось выше, параметр безопасного тормозного пути является важнейшей характеристикой в организации дорожного движения. Безопасный тормозной путь — это расстояние от точки, которую он впервые воспринимает, до момента завершения торможения. Водителям необходимо достаточное время, чтобы они спонтанно отреагировали на препятствие.
Это требует, чтобы расстояние видимости, используемое в геометрическом дизайне, было равно безопасному тормозному расстоянию. Тормозной путь можно определить как сумму пути отставания к тормозному пути.
Расстояние отставания — это расстояние, которое транспортное средство проходит за период времени «t» со скоростью «v» в м/с. Следовательно, расстояние отставания равно ‘ вт ’. Расстояние, которое проходит автомобиль при торможении, называется тормозным путем. В случае ровной дороги работа, совершаемая при остановке транспортного средства, приравнивается к кинетической энергии транспортного средства, которая дает нам тормозной путь.
Пусть «F» — максимальная сила трения, которая развивается, а «l» — тормозной путь. Следовательно, работа, совершаемая против трения, определяется выражением
Расстояние, которое проходит автомобиль при торможении, называется тормозным путем. В случае ровной дороги работа, совершаемая при остановке транспортного средства, приравнивается к кинетической энергии транспортного средства, которая дает нам тормозной путь.
Пусть «F» — максимальная сила трения, которая развивается, а «l» — тормозной путь. Следовательно, работа, совершаемая против трения, определяется выражением
Fl = fWl —> (1)
Здесь W = вес автомобиля. Кинетическая энергия, достигаемая при проектной скорости транспортного средства.
= (1/2г) mv 2 = (1/2г)Wv 2 —> (2)
(1) приравнивается к (2), получаем
(1/2g) Wv 2 = fWl
l = (1/(2fg))v 2
Следовательно,
Расстояние в пределах видимости (SSD) = расстояние отставания + тормозной путь
-> SSD = vt + (1/(2fg))
Здесь v — скорость в м/с 2 , t — время реакции, f — коэффициент трения, g — ускорение свободного падения. В таблице 1 ниже показан коэффициент трения для различных расчетных скоростей. Таблица-1: Коэффициент продольного трения
В таблице 1 ниже показан коэффициент трения для различных расчетных скоростей. Таблица-1: Коэффициент продольного трения
| Скорость км/ч | <0 | 40 | 50 | 60 | >80 |
| ф | 0,4 | 0,38 | 0,37 | 0,36 | 0,5 |
Если дорога имеет восходящий уклон величиной +n%, то к торможению будет добавлена составляющая фактора силы тяжести. Это уменьшит тормозной путь. Эта составляющая силы тяжести действует вдоль направления тормозной силы, определяемой выражением
Wсин? ~ Что? = Втн/100
Приравняв кинетическую энергию и совершенную работу, получим,
l = v 2 / (2g (f + n/100))
Мы также можем рассчитать тормозной путь для нисходящего градиента, который выполняется аналогичным образом, и мы получим:
SSD = vt + (v 2 / (2g (f ±0,01n))
Расстояние видимости для обгона (OSD)
Минимальное расстояние, доступное водителю для безопасного обгона медленно движущегося впереди транспортного средства с учетом движения в противоположном направлении, называется расстоянием видимости для обгона. Это расстояние позволит нам увидеть, свободна ли дорога для обгона.
Дальность видимости для обгона также называется дистанцией видимости для обгона, которая будет измеряться вдоль центральной линии дороги. Это уровень линии, над которым водитель, находящийся на высоте 1,2 м над уровнем дороги, может легко видеть верхнюю часть объекта на высоте 1,2 м над поверхностью дороги.
Это расстояние позволит нам увидеть, свободна ли дорога для обгона.
Дальность видимости для обгона также называется дистанцией видимости для обгона, которая будет измеряться вдоль центральной линии дороги. Это уровень линии, над которым водитель, находящийся на высоте 1,2 м над уровнем дороги, может легко видеть верхнюю часть объекта на высоте 1,2 м над поверхностью дороги.
Основными факторами, влияющими на OSD, являются:
- Расстояние между транспортными средствами
- Скорость транспортных средств
- Уклон дороги
- Коэффициент ускорения обгоняющего автомобиля
- Скорости обгоняющего, обгоняемого и встречного транспортного средства
- Навык водителя
- Реакция водителя
Расчет расстояния видимости в основном зависит от:
- Время реакции водителя
- Скорость автомобиля
- Эффективность тормозов
- Сопротивление трения между шиной и дорогой
- Уклон дороги
Многие факторы, такие как возраст транспортного средства, характеристики транспортного средства, будут влиять на эффективность торможения транспортного средства. Эффективность 100% означает, что транспортное средство остановится в момент применения тормоза. Получить 100% практически невозможно. Это идеальное состояние автомобиля.
Это означает, что для более низкого значения эффективности торможения необходимо получить более высокое значение расстояния видимости. В процессе определения безопасной геометрической конструкции требуется принять эффективность торможения 50 %.
Эффективность 100% означает, что транспортное средство остановится в момент применения тормоза. Получить 100% практически невозможно. Это идеальное состояние автомобиля.
Это означает, что для более низкого значения эффективности торможения необходимо получить более высокое значение расстояния видимости. В процессе определения безопасной геометрической конструкции требуется принять эффективность торможения 50 %.
Остановка транспортного средства также зависит от сопротивления трения между шиной и дорогой. Наличие более высокого значения сопротивления трения приведет к эффективной остановке транспортного средства при применении. Здесь требуемое расстояние видимости будет меньше.
При расчете дальности видимости не учитываются никакие особые положения или соображения в отношении эффективности торможения. Это учитывается наряду с коэффициентом продольного трения. В Индии значение продольного трения составляет от 0,35 до 0,4. Об этом сообщает Индийский дорожный конгресс.
Об этом сообщает Индийский дорожный конгресс.
Скорость автомобиля явно влияет на дальность видимости. Если используемая скорость высока, время, необходимое для остановки транспортного средства, будет большим. Это означает, что с увеличением скорости увеличивается дальность видимости.
Время реакции водителя Время от момента, когда водитель замечает препятствие перед собой, до момента, когда он нажимает на тормоз, называется временем реакции водителя. На основании теории PIEV время реакции можно разделить на 4 составляющие.
Все это время будет объединено, чтобы сформировать общее время реакции восприятия во время реальной практики и проектирования шоссе. На основании проведенных исследований установлено, что водителям в нормальных условиях требуется от 1,5 до 2 секунд. Поскольку это значение может варьироваться в зависимости от характеристик транспортного средства, для целей проектирования можно использовать более высокое значение времени реакции.