Мотивация деятельности: виды и значимость в жизни человека
Содержание статьи
- 1 Мотивация деятельности человека: основные составляющие
- 2 Виды мотивации и их особенности
- 3 Внешняя и внутренняя мотивация в жизни человека
- 4 Разнообразие теорий мотивации человека
- 5 Теория мотивации: особенности содержательного направления
- 6 Мотивация человека: процессуальное направление
- 7 Методы развития
Каждый день любой человек преодолевает множество препятствий на пути к своим целям, планирует и продумывает пути решения тех или иных проблем и задач. Активная жизненная позиция, стремление к всестороннему развитию и личностному росту не в одинаковой степени выражены в людях и ключевым моментом для понимания этого различия является мотивация. Не каждый человек знает, что значит мотивировать себя и других и как правильно работать над развитием мотивации. Ресурс BrainApps поможет усовершенствовать собственную личность с помощью полезных статей и разработанных профессионалами игр.
Мотивация считается процессом, регулирующим поведение, тем, что побуждает человека к деятельности. Ведь за любым поступком или бездействием скрывается мотив, пусть даже и не всегда осознанный. Впервые о мотивации упомянул известный немецкий мыслитель А. Шопенгауэр. Мотивация относится к сложным психологическим феноменам, изучением которого занимались многие ученые и вокруг которого образовалось множество теорий. Чтобы научиться лучше управлять своим временем и прийти к пониманию того, как добиваться поставленных целей, необходимо разобраться, какие существуют виды мотивации и как их успешно применять.
Мотивация деятельности человека: основные составляющие
Если человек не до конца понимает, что значит мотивация, то объяснить что это такое простыми словами достаточно легко. Для начала необходимо выяснить происхождение этого слова и его значение.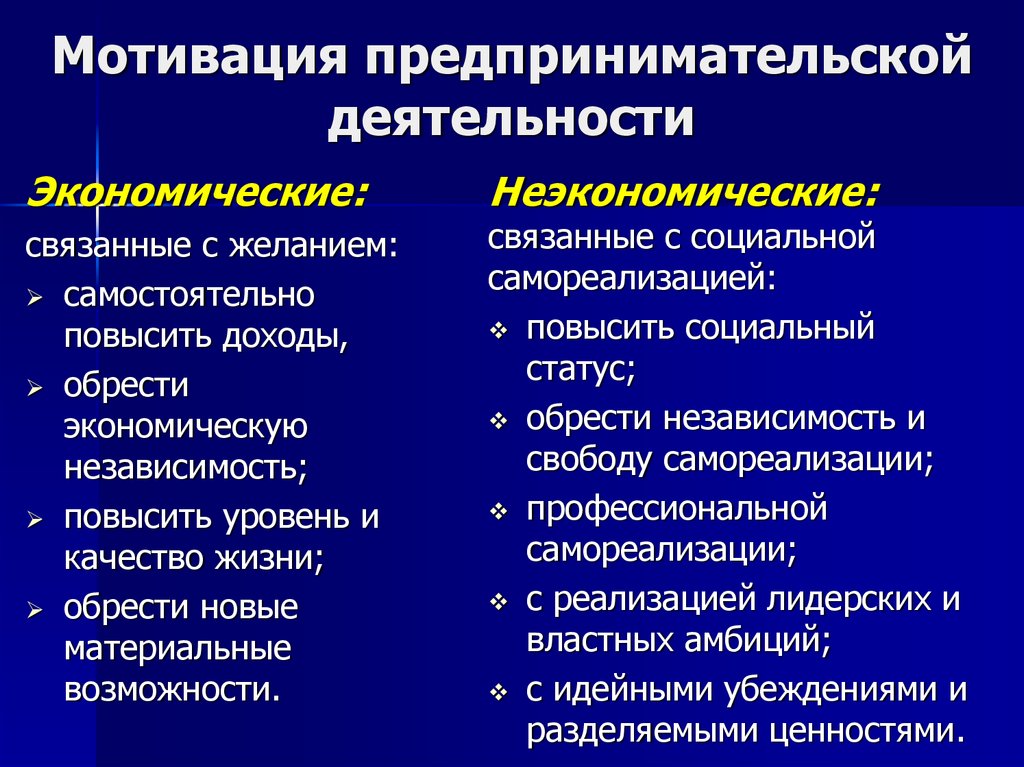 Термин «мотивация» произошел от слова «movere», которое с латыни переводится как «двигать». Узнав происхождение термина уже можно заключить, что мотивация движет поступками личности, толкает ее на совершение определенных действий или, наоборот – к бездействию.
Термин «мотивация» произошел от слова «movere», которое с латыни переводится как «двигать». Узнав происхождение термина уже можно заключить, что мотивация движет поступками личности, толкает ее на совершение определенных действий или, наоборот – к бездействию.
Мотивация является одной из способностей человека, которая помогает ему добиться желаемого. Разработанные теории мотивации показывают человеку ее огромное влияние на способ его жизни, степень активности и организованности. То есть чем больше мотивирована личность, тем большие усилия она прилагает для достижения своих целей. Некоторые ученые понимают мотивацию человека как процесс регуляции деятельности, тогда как другие специалисты подразумевают под этим термином определенный набор мотивов.
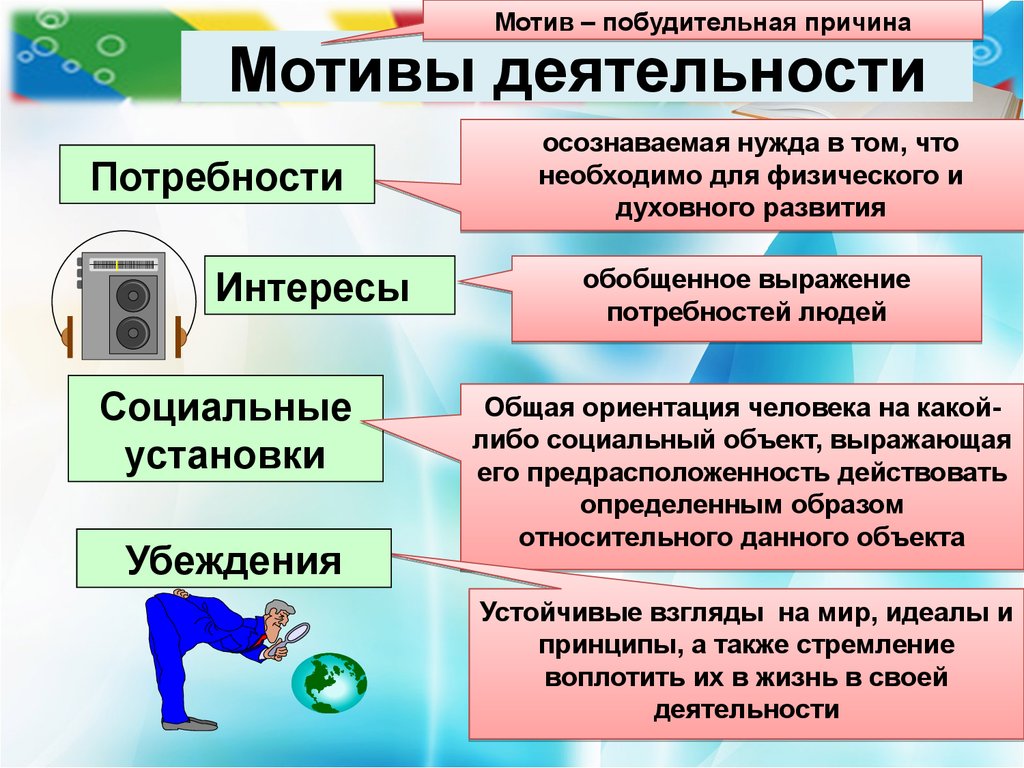
Мотив в психологии – это то, что помогает направлять активные действия человека в определенное русло, является обобщенным образом того, чего человек хочет достигнуть в ходе своей деятельности. Он может проявляться в виде положительных эмоций от достижения цели или отрицательных эмоций в тех случаях, когда цели достигнуть не удалось. Мотив – это не одно и то же, что потребность или цель. В теориях мотивации для человека потребность – это неосознанное желание устранить физический или психологический дискомфорт, тогда как цель устанавливают осознанно в процессе работы над своими желаниями и поступающей извне информацией. Мотивы формируются на основе различных потребностей и являются стимулом к достижению поставленной цели. Подробно они рассматриваются в теориях мотивации, разработанных для человека.
Мотив – это не одно и то же, что потребность или цель. В теориях мотивации для человека потребность – это неосознанное желание устранить физический или психологический дискомфорт, тогда как цель устанавливают осознанно в процессе работы над своими желаниями и поступающей извне информацией. Мотивы формируются на основе различных потребностей и являются стимулом к достижению поставленной цели. Подробно они рассматриваются в теориях мотивации, разработанных для человека.
Виды мотивации и их особенности
Мотивацию человека можно разделить на положительную и отрицательную, устойчивую и неустойчивую. Также бывает внешняя и внутренняя мотивация, имеющая свои особенности. Положительная мотивация для любого человека должна подкрепляться приятными эмоциями, тогда как отрицательная мотивация направлена на избегание негативных переживаний. Устойчивая мотивация распространяется на базовые физиологические потребности человека и является постоянной, а неустойчивая мотивация зависит от потребностей конкретного человека (например, борьба с вредными привычками).
Дополнительно выделяют индивидуальную, групповую и познавательную мотивацию. Индивидуальный вид мотивации для каждого человека заключается в поддержании физиологического состояния организма, а групповая мотивация напрямую связана с построением социальных связей. Познавательная мотивация направлена на изучение нового и проявляется в виде игр, исследовательской деятельности.
Из всего, что побуждало человека к деятельности, также были выбраны наиболее распространенные мотивы. Чаще всего в своих поступках люди руководствуются мотивами власти, самоутверждения, идентификации, присоединения, саморазвития, а также внешними и общественно значимыми мотивами. Другие мотивы также могут быть составляющими основной мотивации для человека. Вас могут мотивировать самые разнообразные вещи и процессы, это зависит от вашего характера, образа жизни и среды профессиональной деятельности. Значение каждой из разновидностей мотивации подробно отображено в теориях мотивации, разработанных ведущими специалистами в сфере психологии.
Внешняя и внутренняя мотивация в жизни человека
Важную роль в повседневной жизни человека играет как внешняя, так и внутренняя мотивация. Внешняя мотивация характеризуется поступлением стимула извне, то есть человек в первую очередь занимается какой-либо работой, чтобы получить вознаграждение, похвалу или признание в обществе. Ярким примером внешней мотивации работающего человека является заработная плата при условии, что сама по себе работа не вызывает у него интереса и не приносит особого удовольствия.
Согласно теориям человеческой мотивации, ее внутренний вид никак не связан с внешними обстоятельствами и человек выбирает определенную деятельность в первую очередь потому, что она приносит ему удовольствие. Например, рисует не для того чтобы выиграть конкурс, а чтобы получить позитивные эмоции. Эти два вида мотивации в жизни обычного человека тесно связаны между собой и нередко одна и та же деятельность подкреплена несколькими мотивами.
Разнообразие теорий мотивации человека
Теории мотивации изучаются в психологии для того, чтобы лучше понять, что побуждает человека к действию и как формируется его поведение.
- Процессуальные;
- Содержательные;
Каждая из этих теорий мотивации привлекла к себе многих сторонников. Изучив основные теории можно лучше понять виды мотивации личности, проанализировать характер действий человека в разных жизненных ситуациях.
Теория мотивации: особенности содержательного направления
Упор в этом направлении мотивации для человека делается на анализе потребностей человека и методах их систематизации. Изучается влияние внутренних эмоционально-волевых импульсов на формирование особенностей поведения личности. Таких принципов теории мотивации придерживались Маслоу, Герцберг, МакКлелланд, Альдерфер.
- Теория Маслоу. Самым важным в этой теории мотивации для любого человека является то, что потребности формируются в группы, между которыми соблюдается строгая иерархия.

- Теория ERG Альдерфера. Согласно этой теории мотивации человека все потребности можно отнести к одной из 3 групп (существование, связи и рост) Разницей между этой теорией мотивации человека от теории Маслоу состоит в том, что Маслоу признавал только однонаправленное движение от низших к высшим потребностям;
- Теория МакКлелланда. Если изучить эту теорию мотивации, то можно увидеть что на протяжении жизни человек может приобретать потребности достижения, соучастия и властвования и одна из них имеет сильное влияние на его характер и поведение;
- Теория Герцберга. В этой теории рассмотрено влияние материальных и нематериальных факторов на становления личности и ее деятельность. Эта теория мотивации человека широко используется руководителями фирм и предприятий для оптимизации работы сотрудников;

Мотивация человека: процессуальное направление
Следующие теории мотивации человека анализируют не только потребности, а еще и усилия, характер деятельности, направленные на достижение желаемой цели.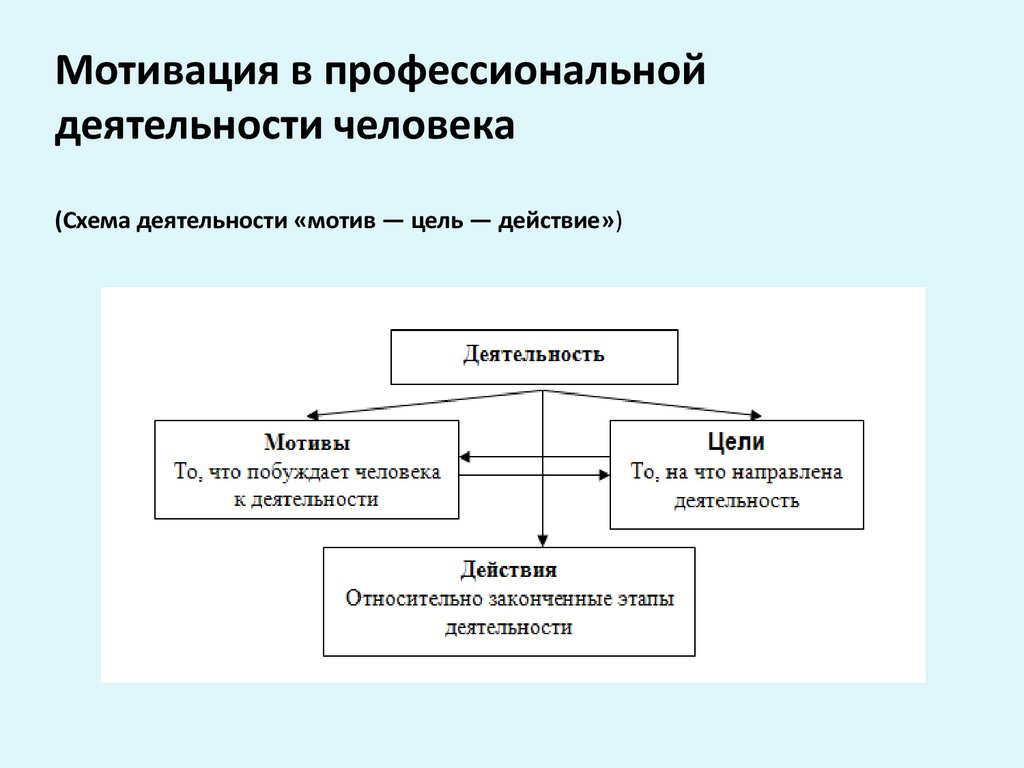 К наиболее известным процессуальным теориям относятся:
К наиболее известным процессуальным теориям относятся:
- Теория ожиданий Врума. Уровень мотивации для конкретного человека зависит не только от наличия потребностей, но и от того, как сильно он готов стараться, чтобы эти потребности удовлетворить. Нужно быть твердо уверенным, что выбранный вами подход будет результативным и поможет достичь цели;
- Теория равенства Адамса. Суть этой теории мотивации для человека состоит в том, что он склонен сравнивать результат определенных действий с результатом других людей, которые попали в похожие жизненные обстоятельства. Поскольку эта теория человеческой мотивации является субъективной, то кроме справедливой оценки человек может недооценить или переоценить полученный другими результат;
- Модель Портера-Лоулера. Эта теория человеческой мотивации сочетает элементы работ Врума и Адамса;
Методы развития
Теории мотивации играют для человека не последнюю роль, ведь понимая, как формируется мотивация, можно использовать эту информацию для достижения своих целей. Успешный человек должен успешно пользоваться разными видами полезной мотивации и уметь при необходимости мотивировать других. Изучив теоретический материал можно выбрать для себя наиболее полезный подход и придерживаться его в повседневной жизни.
Успешный человек должен успешно пользоваться разными видами полезной мотивации и уметь при необходимости мотивировать других. Изучив теоретический материал можно выбрать для себя наиболее полезный подход и придерживаться его в повседневной жизни.
Однако не каждый знает, что значит мотивировать себя и окружающих. Разные методы мотивации применяются специалистами для работников и учащихся. Также существуют методы самомотивации, к которым можно отнести:
- Чтение и повторение аффирмаций;
- Самовнушение;
- Изучение жизненного пути великих людей;
- Визуализация;
Изучение теорий мотивации для человека помогает лучше разобраться в собственном поведении и поведении других людей, разработать план для повышения продуктивности. Как только вы определитесь, что значит мотивировать себя к действию, решение многих задач со временем перестанет быть для вас проблемой.
Достижение успеха в жизни обуславливается не только мотивацией, но и некоторыми другими навыками, например, нестандартными подходами к решению задач. Необходимые функции мозга позволяют развивать индивидуально составленные тренировки на ресурсе BrainApps, которые учитывает сильные и слабые стороны мозга.
Необходимые функции мозга позволяют развивать индивидуально составленные тренировки на ресурсе BrainApps, которые учитывает сильные и слабые стороны мозга.
9 видов мотивации, которые помогут вам достичь цели
24 января 2021 Мотивация
Определите, какой из этих вариантов лучше работает для вас, и комбинируйте их, чтобы добиваться большего.
Эту статью можно послушать. Если вам так удобно, включайте подкаст.
Главные виды
1. Внутренняя мотивация
В этом случае человек вдохновлён внутренними желаниями. Например, когда мы сами хотим похудеть и стать более здоровыми, речь идёт именно о внутренней мотивации. Наша цель — получить удовлетворение от лучшего самочувствия и обновлённого образа в зеркале.
2. Внешняя мотивация
При этом виде мотивации нас побуждают к свершениям желания других людей или обстоятельства. Допустим, если мы также хотим похудеть и лучше выглядеть, но уже из‑за давления со стороны своей второй половины. Наша цель не собственное удовлетворение, а симпатия любимого человека.
Наша цель не собственное удовлетворение, а симпатия любимого человека.
Внешняя мотивация может быть менее эффективной, чем внутренняя, поскольку тут наши стремления зависят не от нас.
Второстепенные виды
3. Мотивация вознаграждением
Этот вариант основан на получении конкретной награды. Как правило, речь идёт о поощрении извне. Но вы можете использовать такой подход и сами. Например, пообещайте себе купить то, что давно хотели, если достигнете цели.
4. Мотивация страхом
Слово «cтрах» ассоциируется с чем‑то ужасным, но в случае с мотивацией это необязательно так. Когда вы становитесь за что‑то ответственными, особенно перед близкими людьми, ваши действия автоматически подкрепляются страхом неудачи.
Этот подход также легко использовать для достижения собственных целей. Например, озвучьте предстоящую задачу публично и скажите, что справитесь с ней. Так вы мотивируете себя страхом невыполненных обещаний.
5. Мотивация достижения
Если вы часто придумываете себе челленджи и не хотите останавливаться на достигнутом, вы имеете дело с мотивацией достижения. Это разновидность внутреннего типа, поэтому она может работать лучше, чем вариант с вознаграждением. Если начальник перестанет побуждать вас к профессиональным свершениям премией, вы всё равно останетесь мотивированы.
Это разновидность внутреннего типа, поэтому она может работать лучше, чем вариант с вознаграждением. Если начальник перестанет побуждать вас к профессиональным свершениям премией, вы всё равно останетесь мотивированы.
6. Мотивация власти
Те, кто стремится влиять на ситуацию и отстаивать своё мнение, подпитываются мотивацией, основанной на власти. Такие люди хотят всё контролировать и побуждать других к выполнению нужных действий. Цели человека не всегда бывают благими, но этот вариант отлично подходит для тех, кто хочет изменить мир вокруг.
7. Мотивация принадлежности
«Скажи мне, кто твой друг, и я скажу, кто ты». Этой фразой руководствуются люди с мотивацией принадлежности. Они развиваются, когда общаются с теми, кто обгоняет их по статусу, профессионализму и уровню образованности. Им нравится, когда эти люди хвалят их работу.
Вы можете окружить себя теми, кто добился целей, к которым вы сами стремитесь. Тогда вы не только сможете спросить у этих людей совета, но и будете мотивированы соответствовать своему окружению.
8. Мотивация компетентности
Вы всегда хотели быть лучшим в том, что делаете? Ваша цель — идеально выполнять работу и достичь успехов в хобби? Тогда вы вдохновлены получением компетентности.
Этот тип мотивации полезен при освоении новых навыков. И он может быть более эффективным, чем стимуляция вознаграждением. Например, когда человек хорошо учится ради повышенной стипендии, его интересуют не знания, а оценки. А если его цель — стать дипломированным специалистом, то он сосредоточится на обретении новых навыков, а стипендия будет лишь приятным бонусом.
9. Мотивация отношения
Вы ощущаете этот тип мотивации, если хотите изменить свой взгляд на мир и на себя в нём.
Под успехом часто понимается набор вполне конкретных достижений: деньги, признание, семья. Но каждого из нас могут радовать другие вещи, и это редко что‑то материальное. Мы хотим, чтобы нас ценили, желаем гордиться тем местом, где мы работаем, и получать удовольствие от того, чем занимаемся. Все действия, направленные на поиск своего места в жизни и гармонии с самим собой, связаны с мотивацией отношения.
Все действия, направленные на поиск своего места в жизни и гармонии с самим собой, связаны с мотивацией отношения.
Какие из этих типов мотивации лучше работают для вас? Делитесь в комментариях.
Читайте также 😄🚀👏
- 10 мифов о мотивации, которые вам только мешают
- Что лучше: позитивная или негативная мотивация
- 8 простых способов мотивировать себя день за днём
РАСПОЗНАВАНИЕ ДЕЯТЕЛЬНОСТИ ЧЕЛОВЕКА С ИСПОЛЬЗОВАНИЕМ СМАРТФОНОВ
БУМАГА — CS660
ГРУППА — 22
ПРОЕКТ ПИНКИ ПРАДАН ПО МАШИННОМУ ОБУЧЕНИЮ
ВВЕДЕНИЕ
Становится доступным множество приложений для измерения в реальном времени, особенно в области регистрации жизни и фитнеса.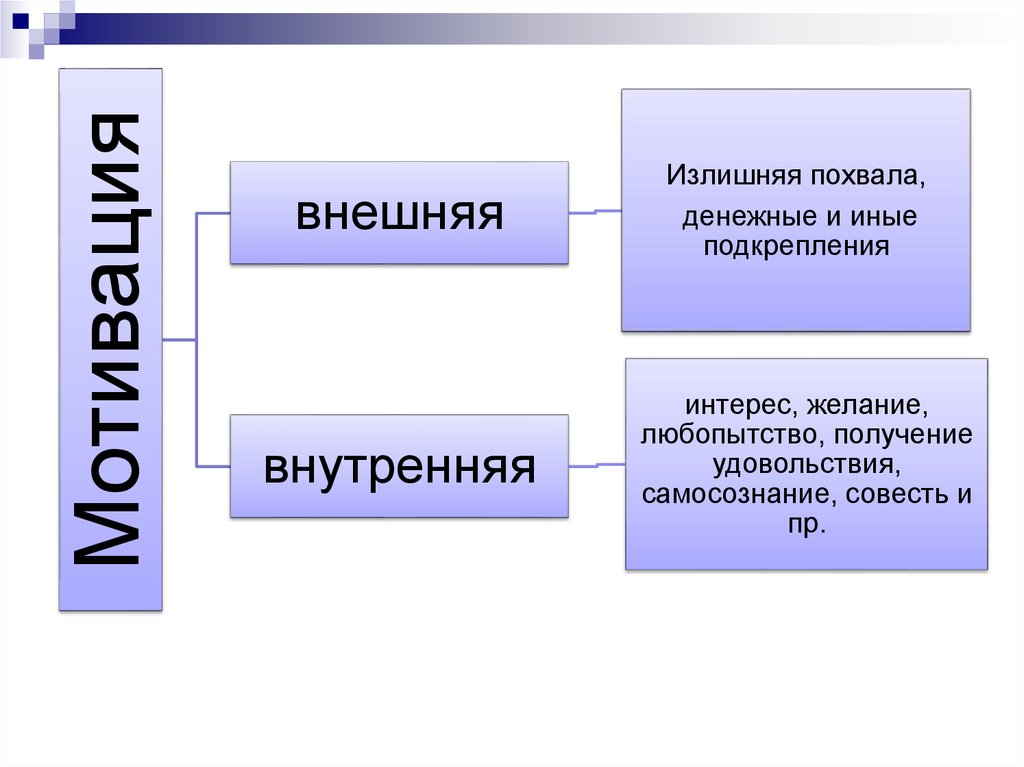 Эти приложения используют мобильные датчики, встроенные в смартфоны, для распознавания действий человека, чтобы лучше понять его поведение.
Система HAR должна распознавать шесть основных действий человека, таких как ходьба, бег трусцой, движение вверх и вниз по лестнице, бег, сон, путем обучения контролируемой модели обучения и отображения результатов действий в соответствии с входными данными, полученными от нашего датчика акселерометра и модели CNN.
Эти приложения используют мобильные датчики, встроенные в смартфоны, для распознавания действий человека, чтобы лучше понять его поведение.
Система HAR должна распознавать шесть основных действий человека, таких как ходьба, бег трусцой, движение вверх и вниз по лестнице, бег, сон, путем обучения контролируемой модели обучения и отображения результатов действий в соответствии с входными данными, полученными от нашего датчика акселерометра и модели CNN.
HRA имеет широкое применение в системе медицинских исследований и опросов людей. Здесь мы разработаем надежную систему распознавания активности на основе смартфона. частотная область.
Рассмотрим приведенный ниже рисунок, на котором показаны различные оси x, y и z датчиков акселерометра в разных направлениях, и эти оси меняют свое направление в соответствии с вращением телефона. Таким образом, если кто-то, у кого есть смартфон, выполняет какие-либо действия, направление этих трех осей изменится соответствующим образом. Затем, наблюдая за этими различными значениями осей акселерометра, мы можем предсказать различные типы действий, выполняемых этим человеком.
Затем, наблюдая за этими различными значениями осей акселерометра, мы можем предсказать различные типы действий, выполняемых этим человеком.
МОТИВАЦИЯ
Система распознавания человека имеет различные подходы, такие как основанный на зрении и
на основе датчиков, которые далее подразделяются на носимые устройства, маркированные объекты, плотное зондирование,
и т. д. Прежде чем двигаться дальше, в системах HAR также существуют некоторые проблемы проектирования, такие как
как выбор различных типов датчиков, набор правил, связанных со сбором данных, распознавание
производительность, количество потребляемой энергии, вычислительную мощность и гибкость.
Учитывая все эти параметры, важно спроектировать эффективную и легкую
модель распознавания человеческой деятельности. Сеть мобильного распознавания активности человека
было предложено использовать подход долговременной памяти для распознавания человеческой деятельности
по данным трехосных акселерометров.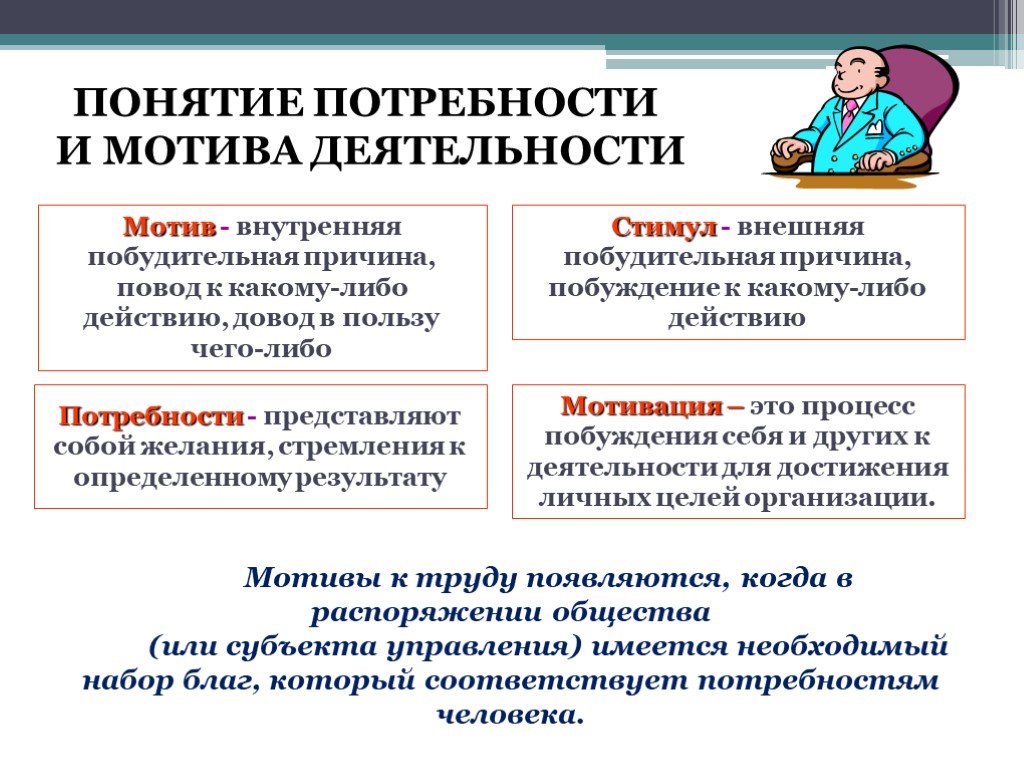
ФОН
Первый подход HAR включает в себя большое количество сенсорных технологий, которые можно носить на теле, известных как носимые датчики, датчики окружающей среды и, вместе они создадут гибридные датчики, которые помогут измерять количество человеческих движения тела. Различные возможности могут быть предоставлены этими сенсорными технологиями. которые могут повысить надежность данных, с помощью которых деятельность человека может быть обнаруживаются, а также предоставляют услуги на основе полученной информации в режиме реального времени. средах, таких как кибер-физические-социальные системы, также существует тип магнитных датчиков, когда встроенные в смартфон могут отслеживать позиционирование без каких-либо Дополнительная стоимость. 2. На основе зрения — RGB-видеокамеры и камеры глубины используются для отслеживания действий человека. 3. Мультимодальность — данные датчиков и визуальные данные используются для обнаружения деятельности человека.
Проектное предложение и план
Идея этого проекта заключается в том, чтобы сначала собрать данные, а затем выполнить некоторую предварительную обработку необработанных собранных данных.
| Неделя | Цель | Комментарии | Обновления/состояние |
|---|---|---|---|
| Неделя 4 | Проектное предложение | Презентация проектного предложения | Готово |
| Неделя 5 | Сбор данных | Сбор набора данных WISDM на основе датчиков | Готово |
| Неделя 6-8 | Подготовка рамы | Визуализация и подготовка кадра | Готово |
| Неделя 8 | реализация модели | CNN, реализация моделей RNN-LSTM | Внедрение выполнено |
| Неделя 9-11 | Распознавание перехода | Другой тип перехода распознавания действий с помощью LSTM | Готово |
| Неделя 12-13 | Представление | Заключительная презентация и подача отчета | Готово |
НАБОР ДАННЫХ
ИСТОЧНИКИ ДАННЫХ
 youtube.com/embed/XOEN9W05_4A?start=1″ title=»YouTube video player» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»>
youtube.com/embed/XOEN9W05_4A?start=1″ title=»YouTube video player» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»> Я буду использовать наборы данных в своем проекте с этого сайта.
Источник: набор данных WISDM
Этот набор данных содержит около 10,98 206 записей, собранных от 33 пользователей, занимающихся 6 различными видами деятельности.
ПРОМЕЖУТОЧНАЯ МИШЕНЬ
BY Midway я постараюсь покрыть до
1. сбор наборов данных
2. Наборы данных балансировки
3. Стандартизация наборов данных
4. Подготовка рамы
5. Понимание того, как реализовать CNN
6. Внедрение 2D CNN(если позволяет время)
ПОСЛЕ ПОЛУПУТИ
1. Внедрение модели CNN (если не будет сделано на полпути)
2. построение кривой обучения
3. Матрица путаницы
4.Все возможные улучшения
5. Написание отчета
Написание отчета
ПРЕЗЕНТАЦИЯ ПРОЕКТА MIDWAY
СВЯЗАННЫЕ ДОКУМЕНТЫ
Связанные документы, которые я собираюсь здесь подробно описать, приведены ниже:
Часть 1: Распознавание активности человека на основе носимых датчиков с использованием гибридных методов глубокого обучения
Документ 2: Облегченная модель глубокого обучения для распознавания действий человека на периферийных устройствах.
ВВЕДЕНИЕ БУМАГИ 1
Распознавание поведения человека (HAR) — это обнаружение, интерпретация и распознавание поведения человека, которые могут использовать интеллектуальную заботу о здоровье для активной помощи пользователям в соответствии с их потребностями. Распознавание поведения человека имеет широкие перспективы применения, такие как мониторинг в умных домах, спорт, управление играми, здравоохранение, уход за пожилыми пациентами, обнаружение и идентификация вредных привычек. Он играет важную роль в углубленном изучении и может сделать нашу повседневную жизнь умнее, безопаснее и удобнее. В этой работе предлагается схема, основанная на глубоком обучении, которая может распознавать как конкретные действия, так и переходы между двумя разными действиями с небольшой продолжительностью и низкой частотой для приложений здравоохранения.
В этой работе предлагается схема, основанная на глубоком обучении, которая может распознавать как конкретные действия, так и переходы между двумя разными действиями с небольшой продолжительностью и низкой частотой для приложений здравоохранения.
НАБОРЫ ДАННЫХ, ИСПОЛЬЗУЕМЫЕ В ЭТОМ ДОКУМЕНТЕ
В этом документе используется набор данных международного стандарта, набор данных распознавания человеческой деятельности на основе смартфона и набор данных постуральных переходов для проведения эксперимента, который сокращенно называется набором данных HAPT. Набор данных представляет собой обновленную версию набора данных UCI «Распознавание человеческой деятельности с использованием популярности». Он предоставляет необработанные данные с датчиков смартфонов, а не предварительно обработанные данные, и собирает данные с датчиков акселерометра и гироскопа. Кроме того, категория действий была расширена и теперь включает действия перехода. Набор данных HAPT содержит двенадцать типов действий.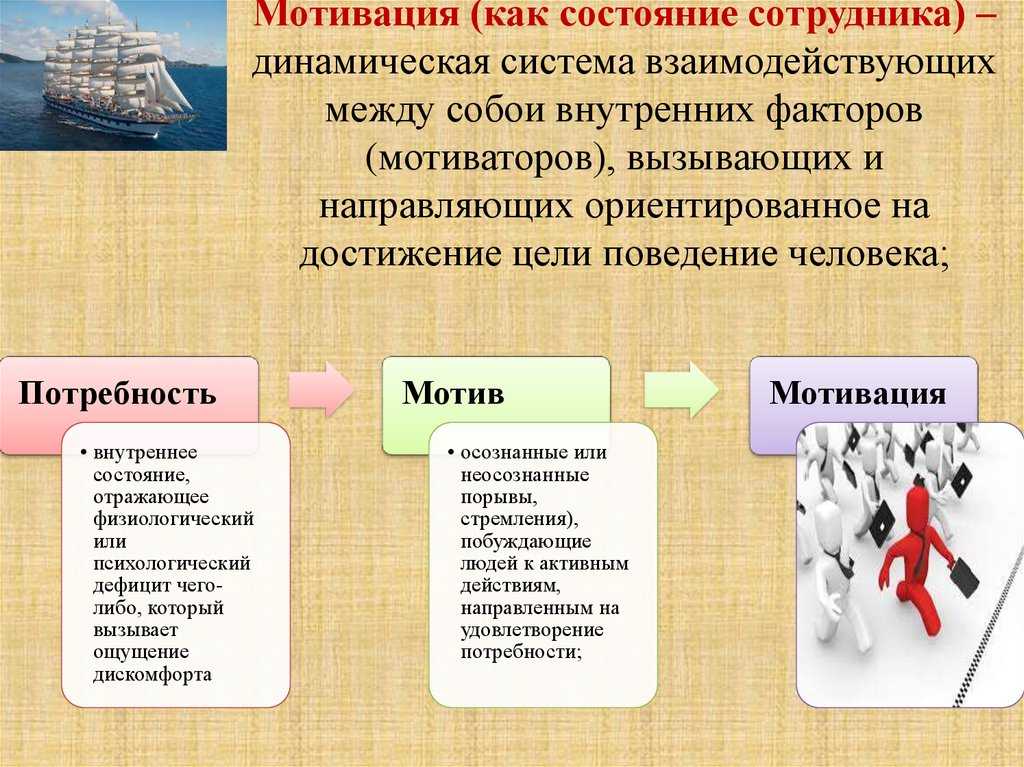 Всего здесь используется 815 614 допустимых фрагментов данных.
Всего здесь используется 815 614 допустимых фрагментов данных.
ПРЕДЛАГАЕМЫЙ МЕТОД
Общая архитектурная схема метода, предложенного в данной статье, показана на рисунке, состоящем из трех частей. Первая часть — это предварительная обработка и преобразование исходных данных, которые объединяют исходные данные, такие как ускорение и гироскоп, в двумерный массив, подобный изображению. Вторая часть состоит в том, чтобы ввести составное изображение в трехслойную сеть CNN, которая может автоматически извлекать признаки движения из изображения активности и абстрагировать признаки, а затем отображать их на карте признаков. Третья часть заключается в том, чтобы ввести вектор признаков в модель LSTM, установить взаимосвязь между временем и последовательностью действий и, наконец, ввести полный слой соединения для достижения слияния нескольких признаков. Кроме того, вводится пакетная нормализация (BN), при которой BN может нормализовать данные на каждом уровне и, наконец, отправить их на уровень Softmax для классификации действий.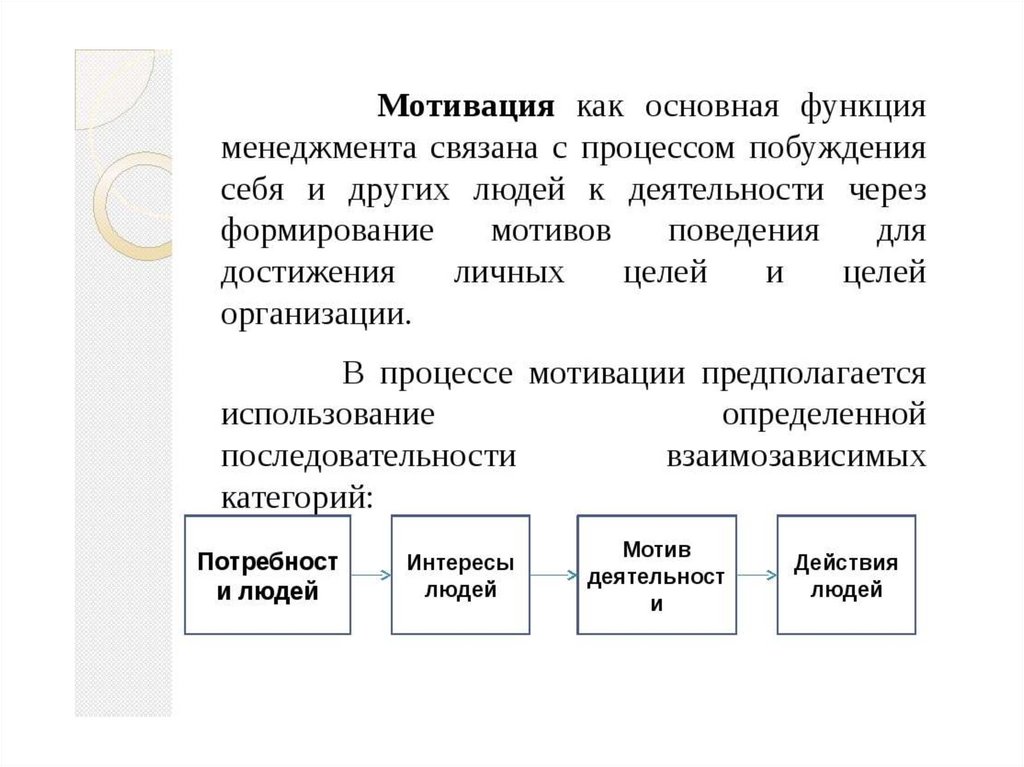
АНАЛИЗ БУМАГИ 1
ОБОСНОВАНИЕ ИСПОЛЬЗУЕМОГО МЕТОДА
Для чего используются данные с датчиков?
Данные о поведении человека могут быть получены с помощью компьютерного зрения. Но подходы, основанные на зрении, на практике имеют много ограничений. Например, использование камеры ограничено различными факторами, такими как свет, положение, угол, потенциальные препятствия и проблемы вторжения в частную жизнь, которые сделать его трудно быть ограниченным в практических приложениях.
Но если мы используем датчики, они более надежны. Но что касается датчиков, то эти носимые датчики имеют небольшие размеры, высокую чувствительность, сильную способность противостоять помехам и, что наиболее важно, они интегрированы с нашими мобильными телефонами, и эти датчики могут точно оценивать текущее ускорение и угловые скорости датчиков движения в режиме реального времени. .
Таким образом, распознавание поведения на основе датчиков не ограничено сценой или временем, что может лучше отражать характер человеческой деятельности.
Поэтому исследования и применение распознавания поведения человека на основе датчиков более разнообразны и значимы.
Почему CNN?
CNN следует иерархической модели, которая работает над построением сети, как воронка, и, наконец, выдает полностью связанный слой, где все сети связаны друг с другом и обрабатывается вывод.
Основным преимуществом CNN по сравнению с другими нейронными сетями является то, что она автоматически определяет важные функции без какого-либо контроля со стороны человека.
Небольшая зависимость от предварительной обработки, его легко понять и быстро реализовать. Он имеет самую высокую точность среди всех алгоритмов, предсказывающих изображение.
Почему LSTM?
LSTM используется здесь для создания моделей распознавания для фиксации временных отношений во входных последовательностях и может обеспечить более точное распознавание.
В этой работе предлагается схема, основанная на глубоком обучении, которая может распознавать как конкретные действия, так и переходы между двумя разными действиями с небольшой продолжительностью и низкой частотой для приложений здравоохранения.
Поскольку LSTM способен распознавать последовательности входных данных, с помощью LSTM мы можем распознавать переходы между двумя различными действиями короткой продолжительности, что означает, что мы можем распознавать переход от стояния к сидению, от сидения к ходьбе, как это.
ВВЕДЕНИЕ К ДОКУМЕНТУ 2:
Здесь архитектура для предлагаемой упрощенной модели разработана с использованием мелкой рекуррентной нейронной сети (RNN) в сочетании с алгоритмом глубокого обучения с долговременной кратковременной памятью (LSTM).
затем модель обучается и тестируется для шести действий HAR на пограничном устройстве с ограниченными ресурсами, таком как RaspberryPi3, с использованием оптимизированных параметров.
Эксперимент проводится для оценки эффективности предложенной модели на наборе данных WISDM, содержащем
данные датчика 29участники выполняют шесть ежедневных действий: бег трусцой, ходьба, стояние, сидение, подъем наверх и
Внизу. И, наконец, производительность модели измеряется с точки зрения точности, точности, отзыва, f-меры и путаницы. матрица и сравнивается с некоторыми ранее разработанными моделями.
матрица и сравнивается с некоторыми ранее разработанными моделями.
НАБОР ДАННЫХ ОПИСАНИЕ
Здесь Android-смартфон со встроенным акселерометром используется для захвата трехосных данных. Набор данных состоит из шести
деятельность, выполненная 29предметы. Эти виды деятельности включают в себя ходьбу, подъем по лестнице, спуск вниз, бег трусцой, подъем наверх, стояние,
и сидит. Каждый субъект выполнял различные действия, неся мобильный телефон в переднем кармане ноги. Постоянная частота дискретизации
Для датчика акселерометра была установлена частота 20 Гц. Подробное описание набора данных приведено в таблице 1 ниже.
Общее количество образцов: 1 098 207
Общее количество субъектов: 29
Активность Образцы  : Процент
Ходьба 4 24 400 38,6%
Бег трусцой 3 42 177 31,2%
Наверху 1 22 869 11,2%
Внизу 1 00 427 9,1%
Сидя 59 939 5,5%
Постоянный 48 397 4,4%
ПРЕДЛАГАЕМЫЙ МЕТОД
Работа облегченной системы HAR на основе RNN-LSTM для пограничных устройств показана на рисунке ниже.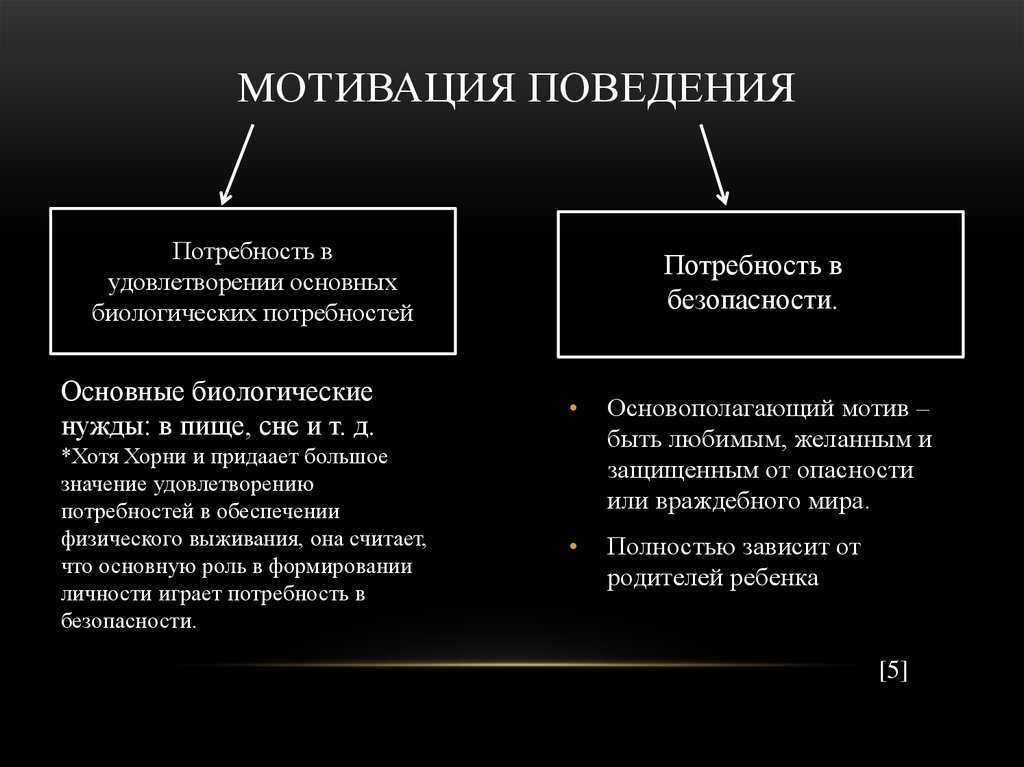 Акселерометр
показание разбивается на окна фиксированного размера T. На вход модели подается набор показаний (x1, x2, x3,…….,xT-1, xT)
захваченное за время T, где xt — это показание, захваченное в любой момент времени t. В этом сегментированном окне показания
затем передается в облегченную модель RNN-LSTM. Модель использует правило суммы и объединяет выходные данные из разных состояний.
использование классификатора softmax для одного конечного вывода этого конкретного окна как oT.
Акселерометр
показание разбивается на окна фиксированного размера T. На вход модели подается набор показаний (x1, x2, x3,…….,xT-1, xT)
захваченное за время T, где xt — это показание, захваченное в любой момент времени t. В этом сегментированном окне показания
затем передается в облегченную модель RNN-LSTM. Модель использует правило суммы и объединяет выходные данные из разных состояний.
использование классификатора softmax для одного конечного вывода этого конкретного окна как oT.
АНАЛИЗ БУМАГИ 2:
ОБОСНОВАНИЕ ИСПОЛЬЗУЕМОГО МЕТОДА
ПОЧЕМУ RNN-LSTM?
=> В предыдущей статье они использовали CNN-LSTM, но здесь используется RNN-LSTM. RNN способны собирать временную информацию из последовательных данных. Он состоит из входного, скрытого и выходного слоев. Скрытый слой состоит из нескольких узлов.
=> Сети RNN страдают от проблемы взрыва и исчезновения градиента. Это препятствует способности сети
смоделировать широкий диапазон временных зависимостей между входными показаниями и действиями человека для длинных окон контекста. RNN, основанные на LSTM, могут устранить это ограничение и могут моделировать длительные окна активности, заменяя традиционные
Узлы RNN с ячейками памяти LSTM. Итак, здесь RNN используется для распознавания действий, а LSTM используется для распознавания различных типов перехода активаций.
RNN, основанные на LSTM, могут устранить это ограничение и могут моделировать длительные окна активности, заменяя традиционные
Узлы RNN с ячейками памяти LSTM. Итак, здесь RNN используется для распознавания действий, а LSTM используется для распознавания различных типов перехода активаций.
Работы, выполненные в документе 1 и документе 2, почти одинаковы. Только в документе 1 они используют модель CNN-LSTM, а в документе 2 используется RNN-LSTM. Ранее использовался набор данных HAPT (человеческая деятельность и постуральные переходы). имеет 815 614 записей и 12 столбцов и содержит значения как акселерометра, так и гироскопа. Но в статье 2 они используют наборы данных WISDM (интеллектуальный анализ данных беспроводного датчика), которые содержат 1 098 207 записей и 6 столбцов, содержащих только значения акселерометра.
БАЗОВАЯ РЕАЛИЗАЦИЯ:
Сначала я собрал свой набор данных, после извлечения этого набора данных я увидел, что набор данных был в таком неструктурированном формате. Затем я попытался преобразовать его в структурированный формат, но, поскольку мой набор данных очень огромен, я не мог сделать его структурированным, используя только python и pandas. Затем я попробовал MS Access и после использования некоторых других статистических инструментов я, наконец, преобразовал это в правильный структурированный формат.
Затем я попытался преобразовать его в структурированный формат, но, поскольку мой набор данных очень огромен, я не мог сделать его структурированным, используя только python и pandas. Затем я попробовал MS Access и после использования некоторых других статистических инструментов я, наконец, преобразовал это в правильный структурированный формат.
Затем я попытался импортировать этот набор данных в свой блокнот Jupyter, но столкнулся с большими проблемами при импорте этого набора данных. Поэтому я переключился на Google Colab и сохранил этот набор данных на диске Google, потому что у Google Colab есть все ограничения, которые после 12
часов все данные будут удалены, и нам нужно будет восстанавливать их снова и снова.
Библиотеки, которые я использовал в своем проекте:
1.Pandas для загрузки набора данных
2.Numpy для выполнения числовых вычислений
3.Matplotlib для построения графика
4.Pickle для сериализации объекта на постоянное хранение
5.
 Scipy для различных научных вычислений и статистических функций
Scipy для различных научных вычислений и статистических функций 6.Tensorflow для создания различных нейронных сетей
7.Seaborn для украшения графиков
8. Sklearn для обучения и тестирования разделения данных и матриц, которые я буду использовать для оценки моей модели.
ИЗУЧЕНИЕ ДАННЫХ
Это сводка набора данных, который я использовал. Этот набор данных содержит 6 действий, имеющих почти 11 тысяч записей.
Из этого снимка справа мы видим, что этот набор данных содержит сильно несбалансированные данные. Здесь имеется в виду, что ходьба и бег трусцой имеют больше записей, то есть 424397 и 342176 записей соответственно, в то время как стояние имеет только 48395 записей. к сильно перетренированному и склонному к ходьбе и бегу трусцой. Итак, нам нужно сбалансировать набор данных, для этого я взял только 3555 записей из каждого действия.
Затем я построил график, который показывает, сколько записей принадлежит каждому действию в виде гистограммы. Здесь 1-й график — это количество действий по сравнению с количеством записей. Затем я построил действия с точки зрения пользователей, что означает, сколько записей принадлежит каждому user.Second график представляет собой количество пользователей и количество записей, принадлежащих каждому пользователю.
Здесь 1-й график — это количество действий по сравнению с количеством записей. Затем я построил действия с точки зрения пользователей, что означает, сколько записей принадлежит каждому user.Second график представляет собой количество пользователей и количество записей, принадлежащих каждому пользователю.
ВИЗУАЛИЗАЦИЯ ДАННЫХ АКСЕЛЕРОМЕТРА
После изучения набора данных я попытался построить эти значения акселерометра для временной метки 10 секунд, чтобы мы могли видеть, как данные акселерометра выглядят визуально для каждого действия.
Поскольку каждое действие следует определенному шаблону, и, глядя на эти шаблоны, мы можем классифицировать, какие значения акселерометра относятся к какому классу. На рисунке ниже видно, что для ходьбы и бега трусцой существует множество вариаций рисунка, но для сидения рисунок почти плоский.
Итак, что моя модель должна узнать, если есть больше вариаций в паттерне, то это будет классифицироваться как бег трусцой, а если вариаций меньше, то это следует классифицировать как сидячее положение.
ПОДГОТОВКА К РАМЕ
Из подготовки кадра нам нужно импортировать статистику scipy. Здесь для временной метки 1 с Размер кадра равен 20. Таким образом, для 4 секунд мы возьмем 80 элементов данных. Исходные общие данные, которые будут подавать нашу нейронную сеть, составляют 80 * 3, т. Е. 240. Hopsize в два раза Размер кадра. Размер прыжка означает, что мы взяли 80 выборок данных, а затем в следующий раз мы хотим взять следующие 80 выборок вперед или нам нужно некоторое перекрытие. Здесь я сначала беру 80 выборок данных и продвигаюсь к 40 выборкам данных. Для 4-секундные данные мы будем рассматривать как уровень, который появляется наибольшее количество раз, которое может быть выполнено путем расчета режима. Затем будет задан уровень этих 4-секундных данных с наибольшим количеством режимов.
РЕАЛИЗАЦИЯ МОДЕЛИ CNN
Здесь я назвал последовательный слой 1st. В 1-м слое я добавил двумерный сверточный слой Con2D. Затем пропускаются 16 фильтров с размером ядра [2,2] и используется функция активации relu.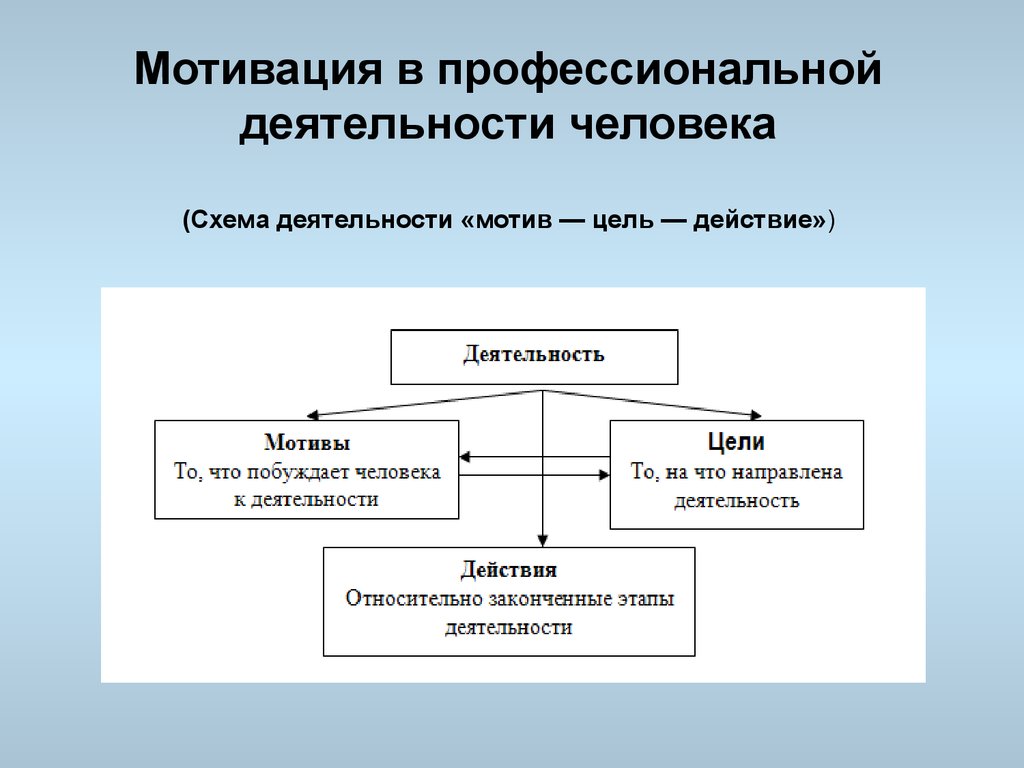 Для 1-го слоя входная форма — x-train . Затем я добавил слой отсева, означающий, что случайным образом было удалено 0,1 или 10% нейронов. Добавлен еще один слой CNN, состоящий из 32 слоев и размером [2,2] с функцией активации relu. В скрытом слое свертки нам не нужно предоставлять входные формы, потому что он автоматически соответствует этим предыдущим слоям. Затем будет добавлено 20% отсева. Затем добавьте плоский, а затем плотный слой, имеющий 64 и функцию активации relu, и случайным образом отбросьте 50% нейронов. Затем добавьте последний слой. Поскольку нам нужно 6 классов, и это многоклассовая классификация, мы берем softmax в качестве функции активации. Для компиляции используется оптимизатор Adam, а функция потерь представляет собой разреженную категориальную перекрестную энтропию. Затем начнется процесс обучения. Я сохранил это в истории обучения модели. Я взял число эпох 10.
Для 1-го слоя входная форма — x-train . Затем я добавил слой отсева, означающий, что случайным образом было удалено 0,1 или 10% нейронов. Добавлен еще один слой CNN, состоящий из 32 слоев и размером [2,2] с функцией активации relu. В скрытом слое свертки нам не нужно предоставлять входные формы, потому что он автоматически соответствует этим предыдущим слоям. Затем будет добавлено 20% отсева. Затем добавьте плоский, а затем плотный слой, имеющий 64 и функцию активации relu, и случайным образом отбросьте 50% нейронов. Затем добавьте последний слой. Поскольку нам нужно 6 классов, и это многоклассовая классификация, мы берем softmax в качестве функции активации. Для компиляции используется оптимизатор Adam, а функция потерь представляет собой разреженную категориальную перекрестную энтропию. Затем начнется процесс обучения. Я сохранил это в истории обучения модели. Я взял число эпох 10. После внедрения этой модели ранее я получил точность обучения 81,23% и точность тестирования 81,77%. Затем я попытался настроить размер кадра и размер прыжка. Затем, неоднократно меняя его, для размера кадра 300 секунд и размера скачка 40 я получил самый высокий процент точности обучения и точности тестирования, но модель была переобучена, и потери были очень высокими. Но для размера кадра 80 секунд и размера прыжка 40 я получил точность обучения 92,34% и точность тестирования 94,77%, а потери были слишком низкими.
Затем я попытался настроить размер кадра и размер прыжка. Затем, неоднократно меняя его, для размера кадра 300 секунд и размера скачка 40 я получил самый высокий процент точности обучения и точности тестирования, но модель была переобучена, и потери были очень высокими. Но для размера кадра 80 секунд и размера прыжка 40 я получил точность обучения 92,34% и точность тестирования 94,77%, а потери были слишком низкими.
Тогда вот изображения кривой обучения. 1-й график строится между количеством эпох и точностью модели. Затем 2-й график строится между количеством эпох и потерей модели. Здесь мы получили неплохую точность. Поскольку потери при проверке меньше, чем потери при обучении, мы можем сказать, что наша модель не является ни переоснащением, ни недообучением.
РЕАЛИЗАЦИЯ RNN-LSTM
Я реализовал модель RNN-LSTM, используя tensorflow. Эта модель состоит из двух стеков слоев LSTM один за другим, по 64 единицы в каждом, а функция активации для LSTM и скрытого слоя — relu, а для выходного слоя — Softmax.
 Мы должны найти 1 из 6 возможных результатов, используя выходной слой. Сначала я инициализировал вес и смещения, затем транспонировал и изменил форму входных данных для лучшей подачи в модель. После этого набор данных был разделен на несколько наборов данных, содержащих по 200 точек данных каждый.
Затем я создал 2 слоя LSTM вплотную друг к другу, и мы легко возвращаем вывод всего RNN, который мы вычисляем, и возвращаем его сюда. Затем я установил регуляризацию L2, а также функцию потерь. Регуляризация L2 для предотвращения переоснащения нашей модели и функции потерь — это просто перекрестная потеря энтропии. Скорость обучения составляет 0,0025, а оптимизатором, который я использовал, является оптимизатор Адама. Затем я тренирую свою модель в течение 50 эпох. Затем я создал сессию, чтобы процесс обучения начался и отображал наш результат.
Мы должны найти 1 из 6 возможных результатов, используя выходной слой. Сначала я инициализировал вес и смещения, затем транспонировал и изменил форму входных данных для лучшей подачи в модель. После этого набор данных был разделен на несколько наборов данных, содержащих по 200 точек данных каждый.
Затем я создал 2 слоя LSTM вплотную друг к другу, и мы легко возвращаем вывод всего RNN, который мы вычисляем, и возвращаем его сюда. Затем я установил регуляризацию L2, а также функцию потерь. Регуляризация L2 для предотвращения переоснащения нашей модели и функции потерь — это просто перекрестная потеря энтропии. Скорость обучения составляет 0,0025, а оптимизатором, который я использовал, является оптимизатор Адама. Затем я тренирую свою модель в течение 50 эпох. Затем я создал сессию, чтобы процесс обучения начался и отображал наш результат.
Через 50 эпох я получил точность обучения и тестирования 100% с потерями при тестировании 0,675827622413635, а потери при обучении составили 0,6414243578910828 . Из кривой обучения мы видим, что по мере увеличения количества эпох потери поездов и потери тестов постепенно уменьшаются. Начиная с эпохи 1 точность обучения и тестирования равна 1.
Из кривой обучения мы видим, что по мере увеличения количества эпох потери поездов и потери тестов постепенно уменьшаются. Начиная с эпохи 1 точность обучения и тестирования равна 1.
Тогда вот снимок матрицы путаницы. Здесь наша модель немного перепутана между верхним и нижним этажами.
УЛУЧШЕНИЯ
Как я уже упоминал ранее, я пытался реализовать переход распознавания действий. Распознавание перехода означает, что предположим, что человек сидит, а затем меняет свою деятельность, что означает, что он внезапно встает, и этому человеку требуется 4 секунды, чтобы изменить свою деятельность. Если мы рассмотрим эти 4-секундные значения акселерометра, то мы не можем классифицировать это ни как стоящее, ни как сидячее. Таким образом, мы должны принять во внимание это признание перехода. Для этого распознавания перехода мне нужен другой набор данных, потому что набор данных, с которым я сейчас работаю, не содержит никаких данных, касающихся этого распознавания перехода. Я много пытался искать, но не смог найти ни одного набора данных, который бы содержал распознавание переходов.
Поэтому я собрал данные с акселерометра своего телефона. Поскольку запись значений датчика довольно сложна, я не смог собрать много данных. Я смог собрать только около 1000 данных с моего телефона, которые содержат 6 переходных действий, то есть из положения сидя в положение стоя, из положения стоя в положение сидя, из положения лежа в положение сидя, из положения сидя в положение лежа, из ходьбы в положение сидя, из положения стоя в положение лежа. Затем я реализовал модель LSTM.
Я получил точность 100%, но потери немного высоки.
Я много пытался искать, но не смог найти ни одного набора данных, который бы содержал распознавание переходов.
Поэтому я собрал данные с акселерометра своего телефона. Поскольку запись значений датчика довольно сложна, я не смог собрать много данных. Я смог собрать только около 1000 данных с моего телефона, которые содержат 6 переходных действий, то есть из положения сидя в положение стоя, из положения стоя в положение сидя, из положения лежа в положение сидя, из положения сидя в положение лежа, из ходьбы в положение сидя, из положения стоя в положение лежа. Затем я реализовал модель LSTM.
Я получил точность 100%, но потери немного высоки.
РЕЗУЛЬТАТЫ
- [1] РЕАЛИЗАЦИЯ CNN
- [2] РЕАЛИЗАЦИЯ RNN-LSTM
- [3] РАСПОЗНАВАНИЕ ПЕРЕХОДА
ЗАКЛЮЧЕНИЕ
Действия, определенные в этом проекте, включают только общие основные действия и отдельные переходные действия. В следующий шаг, можно собрать больше видов действий и многое другое могут быть добавлены сложные действия, такие как еда и вождение. А индивидуальное распознавание можно реализовать, учитывая различия в поведении разных пользователей. Тем временем, модель глубокого обучения все еще нуждается в оптимизации и улучшен. Исследования показывают, что сочетание глубины модель и неглубокая модель могут обеспечить лучшую производительность. Модель глубокого обучения обладает сильными способностями к обучению, в то время как неглубокая модель обучения имеет более высокую эффективность обучения. Этот сотрудничество между ними может достичь более точного и легкое признание.
ССЫЛКИ
- [1] Распознавание активности человека на основе носимых устройств с использованием гибридных методов глубокого обучения
- [2] Облегченная модель глубокого обучения для человеческой деятельности Распознавание на пограничных устройствах
- [3] Эффективная плотная маркировка последовательностей действий человека с носимых устройств с использованием полностью сверточных сетей. Ссылки на авторов открывают панель оверлея
- [4] Обзор распознавания человеческой деятельности с использованием метода на основе зрения
ИСПОЛЬЗОВАНИЕ CNN МОДЕЛИ
Для размера кадра = 300 с и размера шага = 80, точность обучения = 94,66%, точность тестирования = 92,42%, потери при обучении = 0,1436, потери при тестировании = 0,9246 (переобучение)
Для размера кадра = 200 с и размера шага = 60, точность обучения = 94,80%, точность тестирования = 92,30%, потери при обучении = 0,1567, потери при тестировании = 0,9437 (переобучение)
Для размера кадра = 80 с и размера H0p = 40 точность обучения = 91,41%, точность тестирования = 93,87%, потери при обучении = 0,2107, потери при тестировании = 0,2020
С ИСПОЛЬЗОВАНИЕМ RNN-LSTM
Для точек данных = 800, точность обучения = 100%, точность тестирования = 100%, потеря поезда = 0,6414243578910828
, потеря теста = 0,6758276224136353
ДЛЯ ПРИЗНАНИЯ ПЕРЕХОДА
окончательные результаты: точность: 1. 0 потеря: 3.165830373764038
0 потеря: 3.165830373764038
GITHUBLINK:
 Ссылки на авторов открывают панель оверлея
Ссылки на авторов открывают панель оверлеяМодель машинного обучения для анализа человеческой деятельности
##plugins.themes.bootstrap3.article.main##
- Алия Рифат
- Пратикша Прадип Пандао
- Б. Шобан Бабу
LeenaBOT Robotics pvt Ltd, Индия
LeenaBOT Robotics pvt Ltd, Индия
Инженерный колледж SV Тирупати, Индия
Abstract
Распознавание человеческой деятельности является активным предметом исследований и научного прогресса, в котором было представлено несколько моделей для идентификации и категоризации действий с использованием машинного обучения с использованием различных методологий. Цель распознавания человеческой деятельности — просмотреть действия на видео или фотографиях.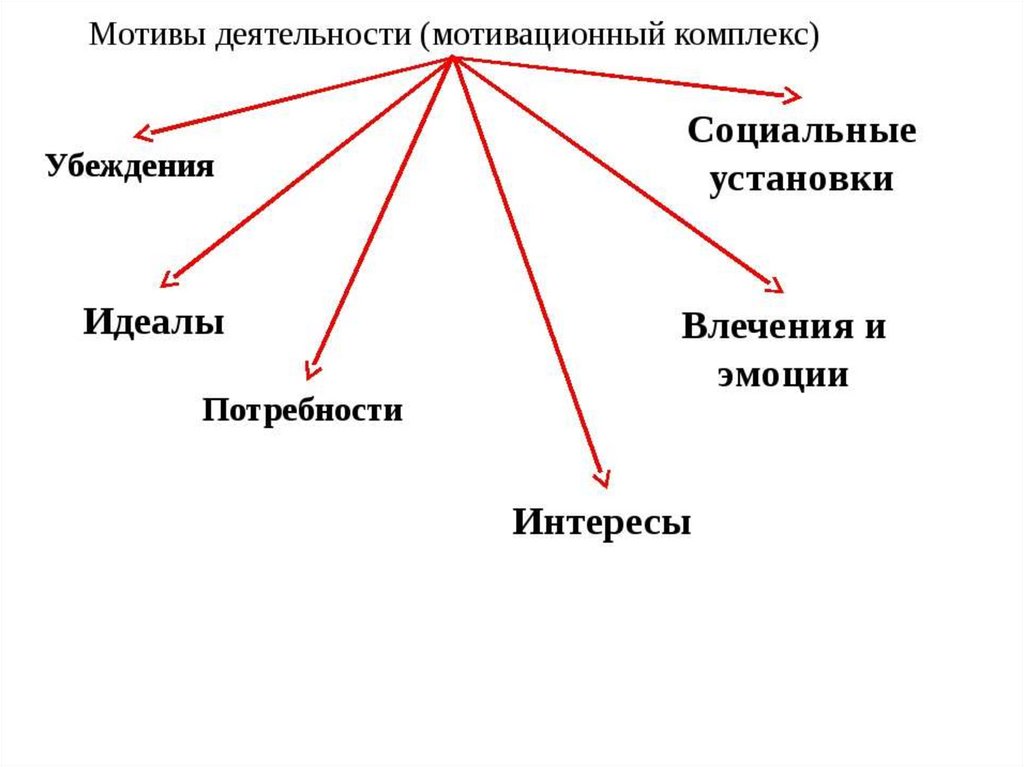 Системы распознавания человеческой деятельности мотивированы этим фактом, и их цель состоит в том, чтобы соответствующим образом классифицировать входные данные по лежащей в их основе категории деятельности. Человеческая деятельность классифицируется как (а) жесты, (б) атомарные действия, (в) взаимодействия человека с объектом или человека с человеком, (г) коллективные действия, (д) поведение и (е) события, в зависимости от на их сложности. Сегодня информатика здравоохранения является критически важной областью для повышения эффективности здравоохранения за счет оптимизации сбора, хранения и поиска критически важных данных о здоровье пациентов. В этой статье представлена интеллектуальная интеллектуальная система здравоохранения, которая использует подходы машинного обучения для обеспечения повсеместного распознавания человеческой деятельности (HAR) в автоматическом режиме. Цель состоит в том, чтобы точно и эффективно моделировать и распознавать повседневную деятельность. Кроме того, для целей HAR мы фокусируемся на наборе данных, собирающем записи движений тела и показателей жизнедеятельности от добровольцев разного профиля при выполнении различных физических упражнений.
Системы распознавания человеческой деятельности мотивированы этим фактом, и их цель состоит в том, чтобы соответствующим образом классифицировать входные данные по лежащей в их основе категории деятельности. Человеческая деятельность классифицируется как (а) жесты, (б) атомарные действия, (в) взаимодействия человека с объектом или человека с человеком, (г) коллективные действия, (д) поведение и (е) события, в зависимости от на их сложности. Сегодня информатика здравоохранения является критически важной областью для повышения эффективности здравоохранения за счет оптимизации сбора, хранения и поиска критически важных данных о здоровье пациентов. В этой статье представлена интеллектуальная интеллектуальная система здравоохранения, которая использует подходы машинного обучения для обеспечения повсеместного распознавания человеческой деятельности (HAR) в автоматическом режиме. Цель состоит в том, чтобы точно и эффективно моделировать и распознавать повседневную деятельность. Кроме того, для целей HAR мы фокусируемся на наборе данных, собирающем записи движений тела и показателей жизнедеятельности от добровольцев разного профиля при выполнении различных физических упражнений. Это исследование показало, что идентифицировать деятельность человека по данным датчиков чрезвычайно сложно, даже при наличии ряда подходов машинного обучения. Когда дело доходит до методов машинного обучения, не существует универсального подхода.
Это исследование показало, что идентифицировать деятельность человека по данным датчиков чрезвычайно сложно, даже при наличии ряда подходов машинного обучения. Когда дело доходит до методов машинного обучения, не существует универсального подхода.
Ключевые слова: IoT, LeenaBOT, машинное обучение, интеллектуальное здравоохранение
Ссылки
Канаде П., Прасад Дж.П. Методы машинного обучения в классификации и наблюдении за состоянием растений. 2021 5-я Международная конференция по вычислительным методологиям и коммуникациям (ICCMC) IEEE. 2021; 729-734.
Турага П., Челлаппа Р., Субрахманиан В.С., Удреа О. Машинное распознавание человеческой деятельности: опрос. IEEE Transactions on Circuits and Systems for Video Technology. 2008 г.; 18(11): 1473-1488.
Lee D, Yang M-H, Oh S. Быстрая и точная оценка позы головы с помощью случайных лесов проекций. Материалы Международной конференции IEEE по компьютерному зрению (ICCV ’15).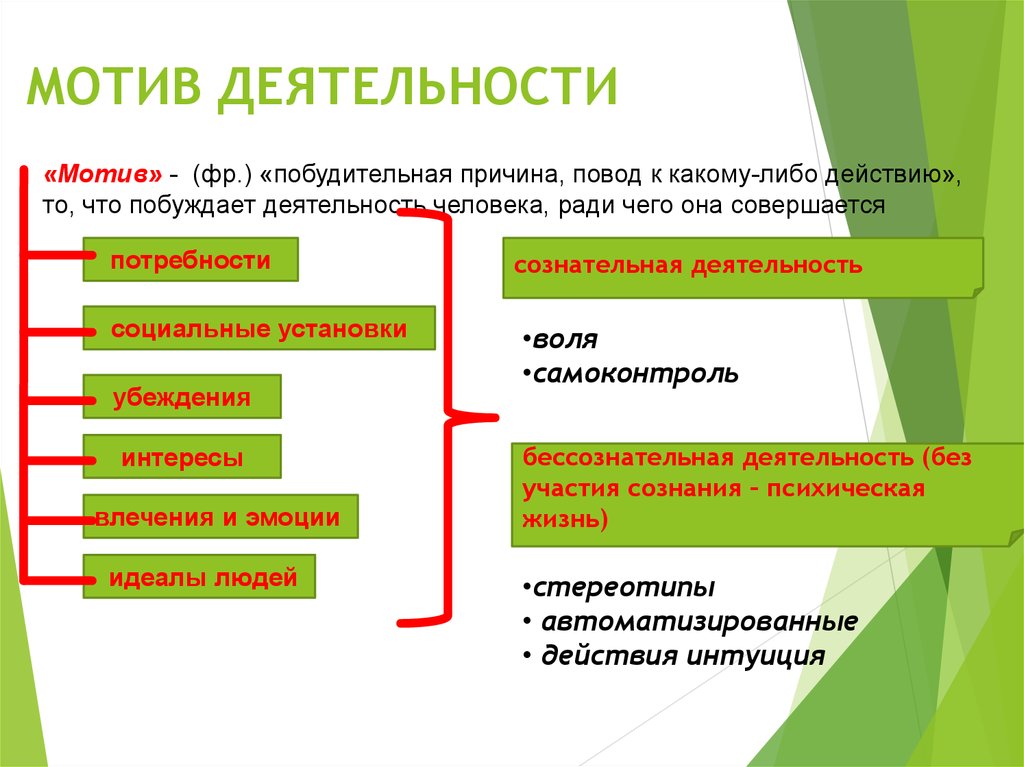 IEEE. 2015:1958-1966.
IEEE. 2015:1958-1966.
Юсефи С., Наруи Х., Даял С., Эрмон С., Валаи С. Опрос по распознаванию поведения с использованием информации о состоянии канала Wi-Fi. IEEE Comms Mag. 2017; 55 (10).
Ли Х., Ота К., Донг М., Го М. Изучение деятельности человека с помощью информации о состоянии канала Wi-Fi с несколькими точками доступа. IEEE Com Mag. 2018; 56(5).
Коломани Б., Аль-Фукаха А., Бенхадду Д., Гупта А. Роль глубоких нейронных сетей lstm и сетей Wi-Fi в поддержке прогнозирования занятости в умных зданиях. IEEE 19-я международная конф. на ГПЦК; IEEE 15-я международная конф. на СмартСити; IEEE 3-й междунар. конф. на ДСС. 2017: 50-577.
Цзоу Х., Чжоу Ю., Ян Дж., Спанос С.Дж. На пути к умным зданиям, управляемым активностью жильцов, с помощью IoT-устройств с поддержкой Wi-Fi и глубокого обучения. Энергия и здания. 2018; 177: 12-22.
Канаде П., Прасад Дж.П. Машинное обучение на основе Arduino и интеллектуальная система орошения IoT. Международный журнал мягких вычислений и инженерии (IJSCE). 2021; 10(4): 1-5.
2021; 10(4): 1-5.
Агарвал I, Кушваха АКС, Сривастава Р. (2015). Взвешенное быстрое динамическое искажение времени, основанное на многоракурсном распознавании человеческой деятельности с использованием датчика RGB-D. [Интернет] 2015. Доступно по адресу: https://ieeexplore.ieee.org/document/74
Соркун М.С., Данишман А.Е., Дурмаз Инчел О. Распознавание человеческой деятельности с помощью датчиков мобильных телефонов: влияние датчиков и размера окна. [Интернет] 2015 г. Доступно по адресу: https://ieeexplore.ieee.org/document/ 8404569.
Канаде П., Прасад Дж. П., Канаде С. Интеллектуальное медицинское кресло-коляска для независимых пожилых людей на основе IOT. Европейский журнал электротехники и компьютерных наук. 2021; 5(5): 4-9.
Käse N, Babaee M, Rigoll G. Многоракурсное распознавание человеческой деятельности с использованием частоты движения. [Интернет] 2017. Доступно по адресу: https://sigport.org/sites/default/files/docs/ICIP_PaperID1443_Final.pdf.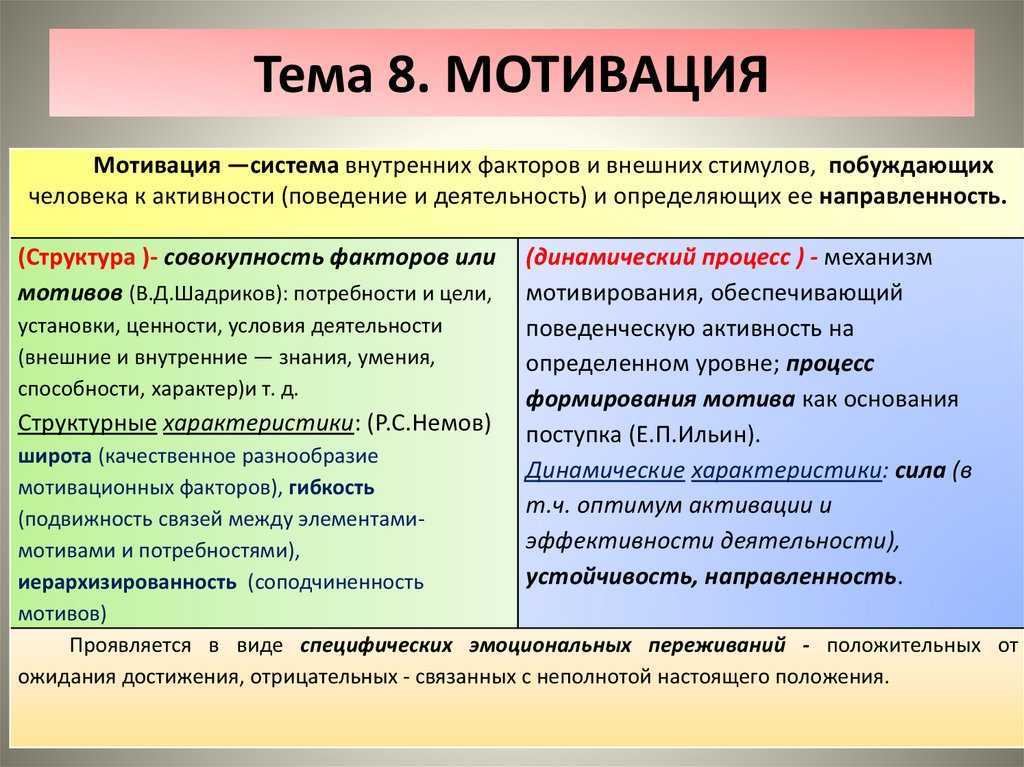
Канаде П., Прасад Дж.П. Мобильный и геолокационный сервис с использованием дополненной реальности: обзор. Европейский журнал электротехники и компьютерных наук. 2021; 5(2): 13-18.
Chen Z, Zhu Q, Soh YC, Zhang L. Надежное распознавание активности человека с помощью датчиков смартфона через ct-pca и онлайн-SVM. IEEE Transactions по промышленной информатике. 2017; 13(6): 3070-3080.
Сунь Л., Чжан Д., Ли Б., Го Б., Ли С. Распознавание активности на мобильном телефоне со встроенным акселерометром в различных положениях и ориентациях. Международная конференция по повсеместному интеллекту и вычислениям. Спрингер, 2010: 548–562.
Джахангири А., Ракха Х.А. Применение методов машинного обучения для распознавания видов транспорта с использованием данных датчиков мобильных телефонов», «Транзакции IEEE в интеллектуальных транспортных системах». 2015 г.; 16(5): 2406-2417.
Канаде П., Канаде С. Робот-помощник ARM для COVID-19Лечение пациентов — проект Raspberry Pi. Международный исследовательский журнал инженерии и технологий. 2020; 7(10): 105-111.
Международный исследовательский журнал инженерии и технологий. 2020; 7(10): 105-111.
Ji S, Xu W, Yang M, Yu K. Трехмерные сверточные нейронные сети для распознавания действий человека. [Интернет] 2012. Доступно по адресу: https://ieeexplore.ieee.org/document/6165309.
Симонян К., Зиссерман А. Двухпотоковые сверточные сети для распознавания действий в видео. [Интернет] 2014. Доступно по адресу: https://arxiv.org/abs/1406.2199.
Ng JH-Y, Hausknecht M, Vijayanarasimhan S, Vinyals O, Monga, Toderici RG. Помимо коротких фрагментов: глубокие сети для классификации видео. [Интернет] 2015. Доступно по адресу: https://arxiv.org/abs/1503.089.09.
Канаде П., Альва П., Прасад Дж. П., Канаде С. Умная система мониторинга мусора с использованием Интернета вещей (IoT). 2021 5-я Международная конференция по вычислительным методологиям и коммуникациям (ICCMC). IEEE. 2021: 330-335.
Канаде П., Алва П., Канаде С., Гатвал С. Автоматизированный робот ARM с ультразвуковым датчиком на сборочной линии.